Cs-Ro

Right-Side-Out: Learning Zero-Shot Sim-to-Real Garment Reversal
CRISP -- Compliant ROS2 Controllers for Learning-Based Manipulation Policies and Teleoperation
Constraint Manifold Exploration for Efficient Continuous Coverage Estimation
DreamDojo: A Generalist Robot World Model from Large-Scale Human Videos

SuReNav: Superpixel Graph-based Constraint Relaxation for Navigation in Over-constrained Environments

DynaRetarget: Dynamically-Feasible Retargeting using Sampling-Based Trajectory Optimization
A Deconfounding Framework for Human Behavior Prediction: Enhancing Robotic Systems in Dynamic Environments
Bridging the Indoor-Outdoor Gap: Vision-Centric Instruction-Guided Embodied Navigation for the Last Meters
Beyond the Majority: Long-tail Imitation Learning for Robotic Manipulation
RAPID: Reconfigurable, Adaptive Platform for Iterative Design
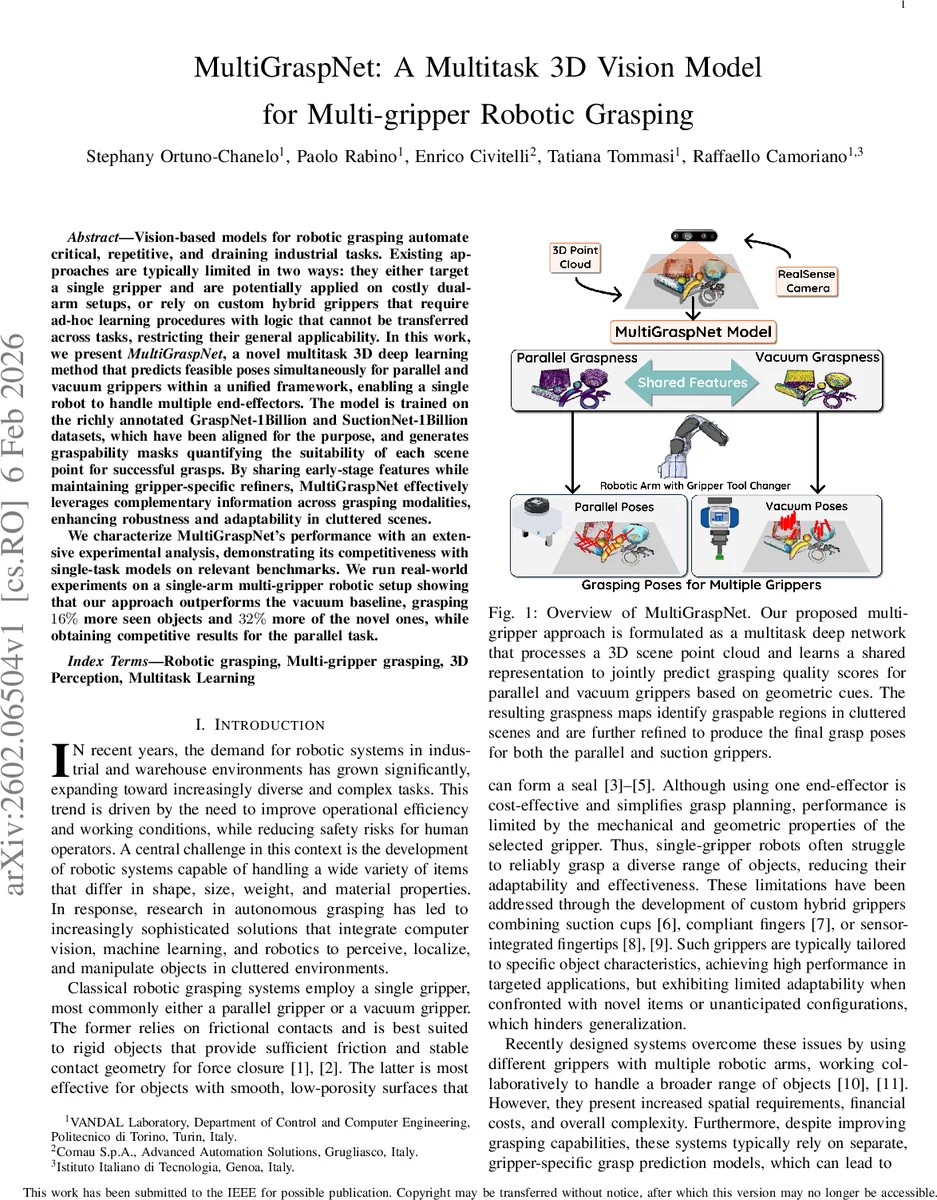
MultiGraspNet: A Multitask 3D Vision Model for Multi-gripper Robotic Grasping
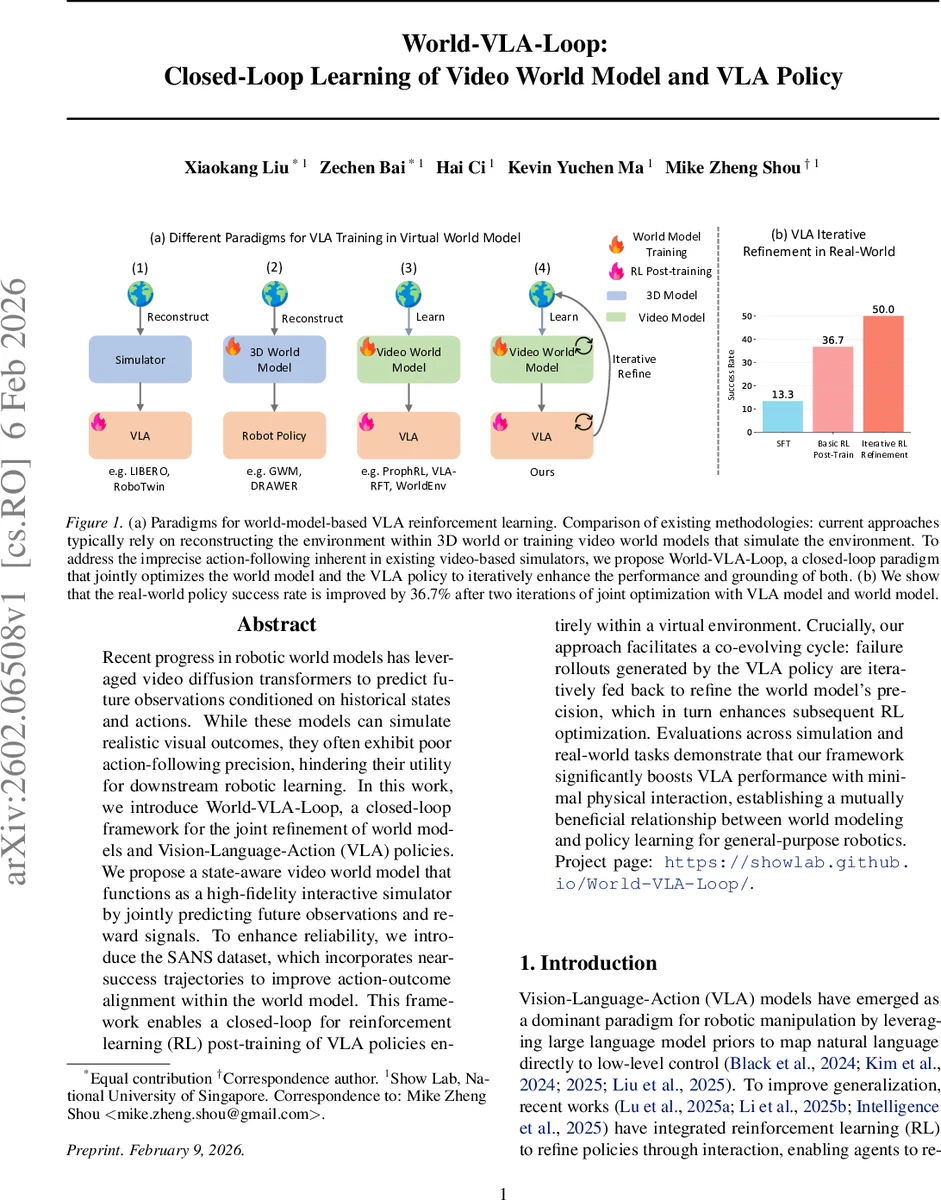
World-VLA-Loop: Closed-Loop Learning of Video World Model and VLA Policy
SPIDER: Scalable Physics-Informed Dexterous Retargeting
TFusionOcc: Student's t-Distribution Based Object-Centric Multi-Sensor Fusion Framework for 3D Occupancy Prediction
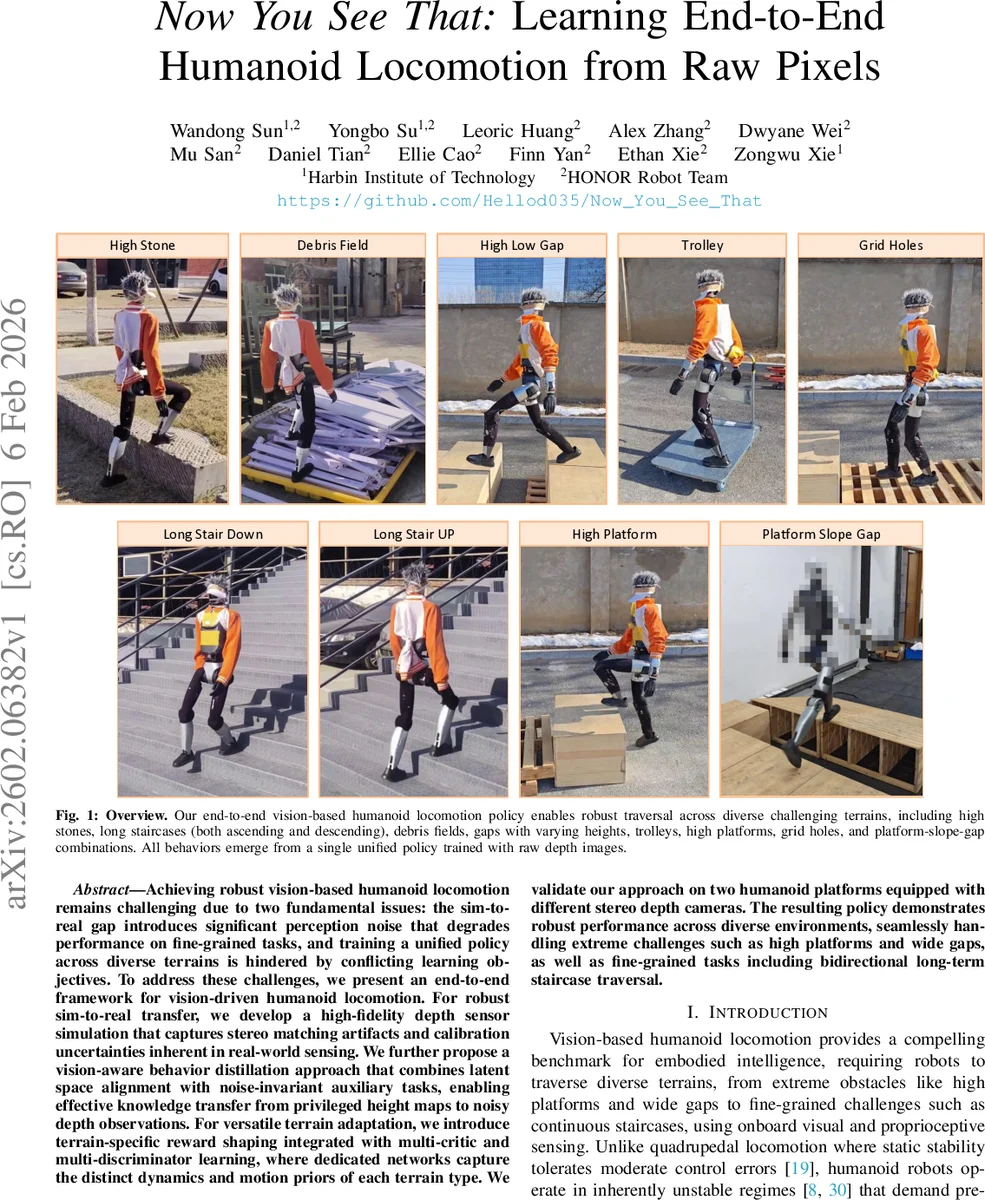
Now You See That: Learning End-to-End Humanoid Locomotion from Raw Pixels

Towards Adaptive Environment Generation for Training Embodied Agents

ECO: Energy-Constrained Optimization with Reinforcement Learning for Humanoid Walking
User-Centric Object Navigation: A Benchmark with Integrated User Habits for Personalized Embodied Object Search
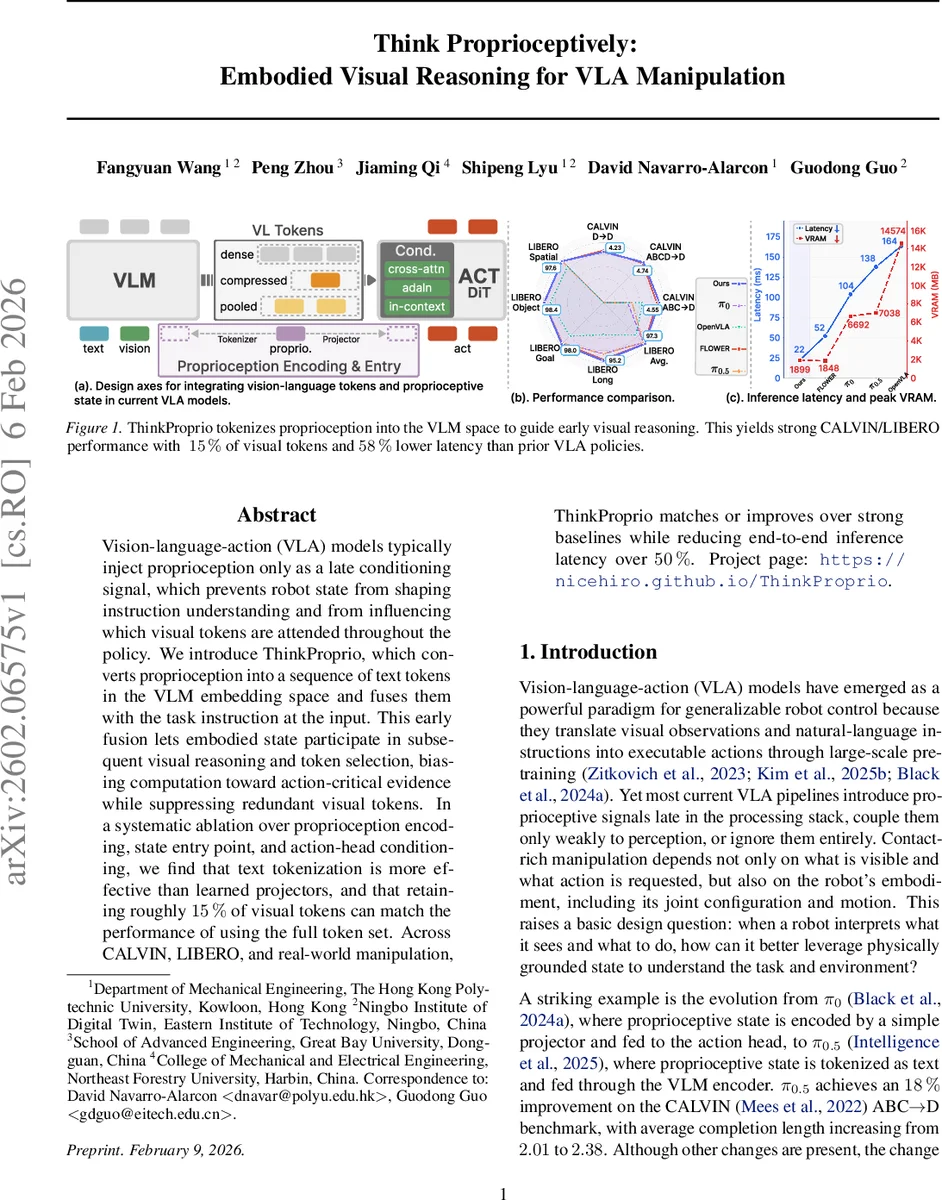
Think Proprioceptively: Embodied Visual Reasoning for VLA Manipulation
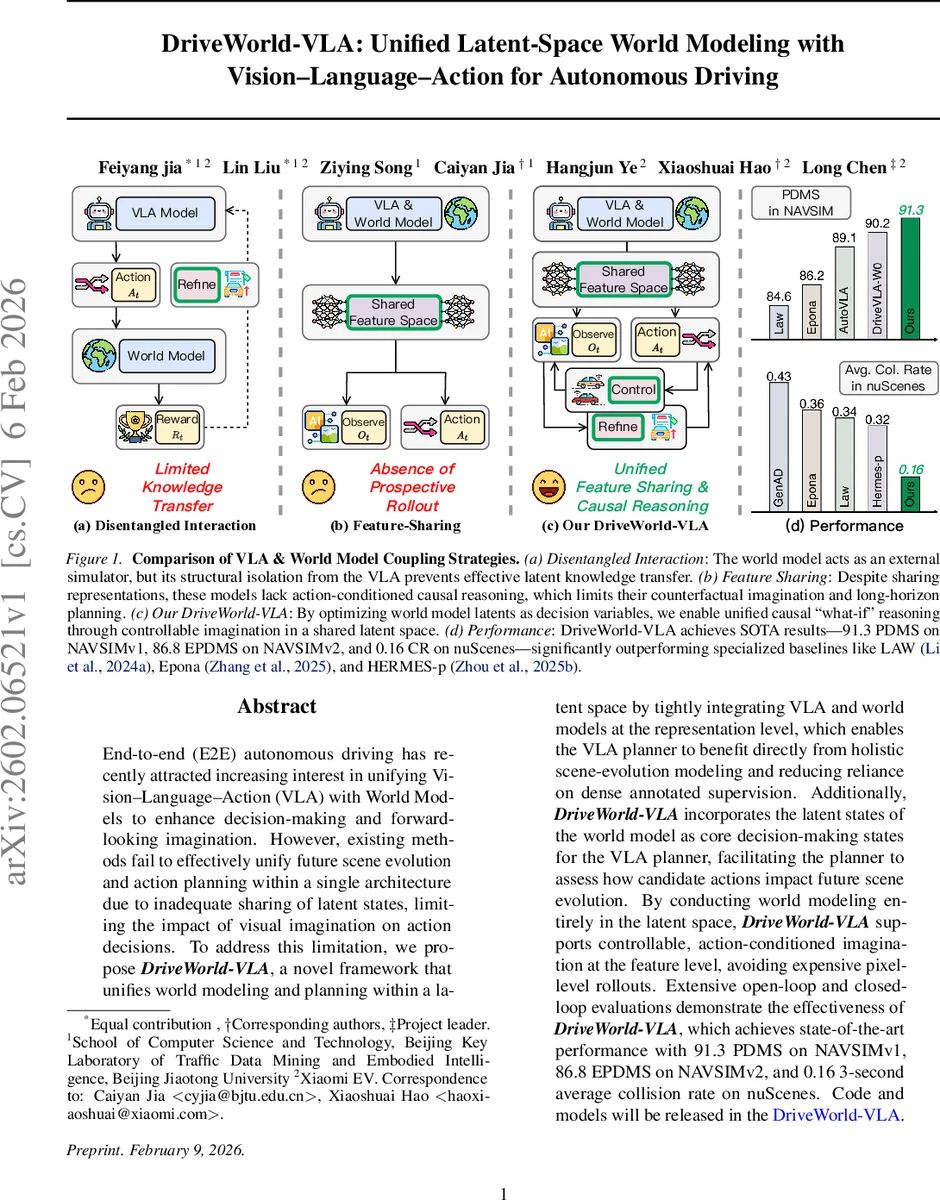
DriveWorld-VLA: Unified Latent-Space World Modeling with Vision-Language-Action for Autonomous Driving
Primary Experimental Feedback on a Co-manipulated Robotic System for Assisted Cervical Surgery
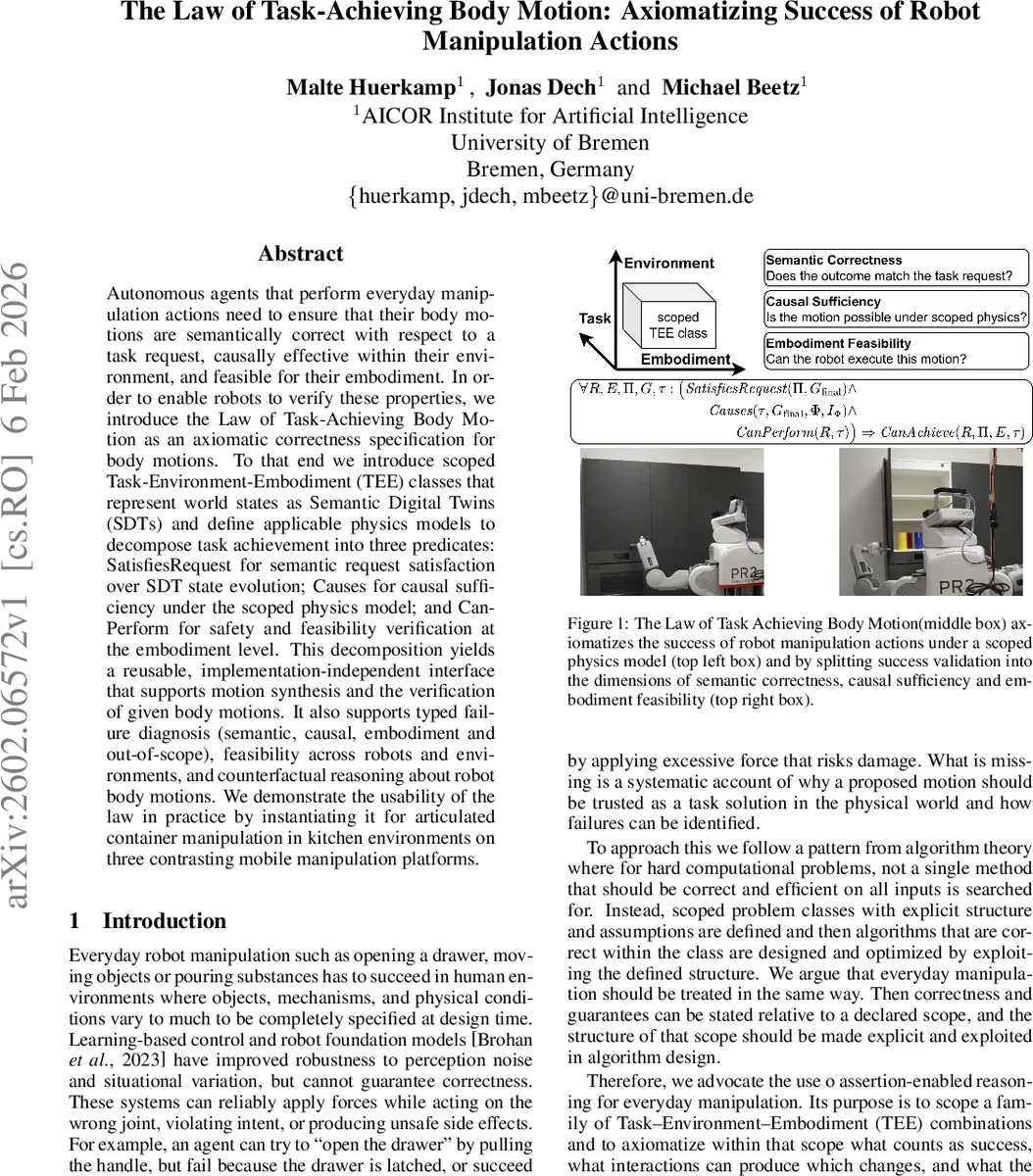
The Law of Task-Achieving Body Motion: Axiomatizing Success of Robot Manipulation Actions