다중클러스터 핀칭 안테나 기반 각도 의존 RCS 활용 ISAC 시스템 설계
** 본 논문은 유전체 파이프라인 위에 배치된 핀칭 안테나(PA)를 클러스터 단위로 묶어, 각 클러스터를 시간 슬롯별로 선택·이동시켜 빔포밍과 다각도 목표 조명을 동시에 구현한다. 각도에 따라 변하는 레이더 단면(RCS)을 상관된 복소 가우시안 변수로 모델링하고, 감지 SNR 누적값이 임계값 이하가 되는 감지 아웃지 확률을 최소화하도록 클러스터 선택·안테나 위치·활성 시간 등을 공동 최적화한다. 제안 알고리즘은 Chernoff 경계와 MM‑…
저자: Ata Khalili, Brikena Kaziu, Vasilis K. Papanikolaou
**
본 논문은 차세대 6G 무선망에서 통신과 레이더 감지를 동시에 수행하는 통합 감지·통신(ISAC) 시스템을 위한 새로운 안테나 구조와 최적화 프레임워크를 제안한다. 핵심 아이디어는 유전체 파이프라인 위에 배치된 핀칭 안테나(PA)를 여러 클러스터로 구분하고, 각 클러스터 내부의 안테나를 연속적으로 이동시켜 빔포밍을 구현한다는 점이다. 클러스터는 물리적으로 서로 떨어져 있어 각기 다른 조망각(look‑angle)에서 목표를 관측하게 되며, 이는 레이더 단면(RCS)이 각도에 따라 크게 변동하는 물리적 현상을 활용한다.
**시스템 모델**
- DFRC(dual‑function radar‑communication) 기반 베이스스테이션이 유전체 파이프라인(길이 Dₓ, 고도 d) 위에 PA 클러스터 M개를 배치한다. 각 클러스터는 N_T개의 이동 가능한 PA를 포함하고, 클러스터 중심 xₘ은 사전에 고정된다.
- 시간 슬롯 t(총 T슬롯)마다 하나의 클러스터만 활성화되며, 해당 클러스터의 PA를 선형 구간 L 내에서 최적 위치 xₘ,ₙ에 배치한다.
- 활성 클러스터는 동시에 통신 사용자 k와 정적 목표 e를 향해 신호를 전송한다. 통신 채널은 파이프라인 내 손실·위상(α, λ_g)과 자유공간 전파(거리 dₖ,ₘ,ₙ, 파장 λ) 두 부분으로 모델링된다.
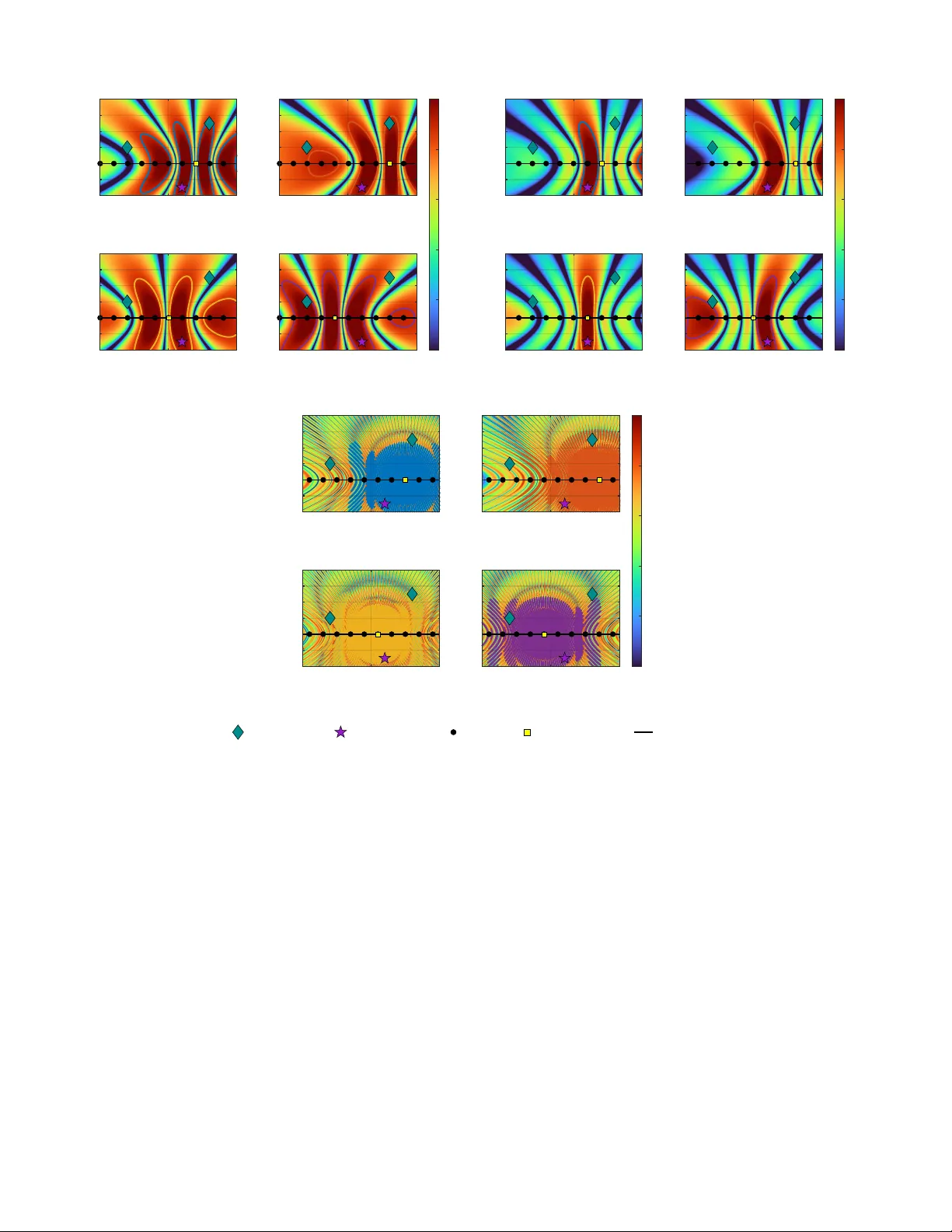
- 목표에 대한 레이더 반사는 각도 의존 RCS σₘ²(θₘ)로 표현되며, 서로 인접한 각도 사이의 RCS는 상관된 복소 가우시안 변수 Σₘ로 모델링한다. 이는 “연속적인 스캐터링”을 통계적으로 반영한다.
**성능 지표**
- 감지 아웃지 확률 P_out = Pr( Σ_t γ_t < γ_th ), 여기서 γ_t는 슬롯 t의 감지 SNR이며 누적 SNR이 임계값 γ_th 이하가 되는 확률이다.
- 통신 측면에서는 평균 데이터율 R_k ≥ R_k^min 을 보장해야 한다.
**최적화 문제**
- 목적: P_out 최소화
- 변수: (i) 클러스터 선택 이진 변수 bₘ(t), (ii) 사용자 선택 이진 변수 u_k(t), (iii) 클러스터 내 안테나 위치 xₘ,ₙ(t), (iv) 슬롯 길이 τ(t)
- 제약: (a) 각 슬롯당 하나의 클러스터·하나의 사용자, (b) 안테나 최소 간격 d_min, (c) 총 시간 제한 Σ_t τ(t) ≤ T_max, (d) 평균 통신률 제약.
이 문제는 비선형·혼합정수 형태(MINLP)로 직접 해결이 어려워, 저자는 다음과 같은 두 단계 접근법을 제시한다.
1. **Chernoff 경계**: 감지 아웃지 확률에 대한 지수 상한을 도출해 로그‑볼록 형태의 목적함수 L(·)를 얻는다.
2. **MM 프레임워크**: 현재 변수값을 고정하고, 목적함수의 상한을 근사하는 대리함수를 구성한다. 각 서브문제는
- **이진 변수 완화**: bₘ(t), u_k(t) 를 연속
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기