위성 공중 지상 통합망의 RIS UAV와 RSMA를 활용한 가중합률 최적화
본 논문은 위성·공중·지상 3계층 통합망(SAGIN)에 RIS‑UAV와 레이트‑스플리팅 다중접속(RSMA)을 결합한 시스템을 제안한다. 위성 및 지상 기지국은 UPA 안테나를, UAV는 반사형 RIS를 탑재해 가상 LOS 경로를 형성한다. 가중합 데이터 전송률을 최대화하기 위해 빔포밍, RIS‑UAV 위치·방향, 위상시프트, 레이트‑스플리팅을 공동 최적화한다. 비선형·비볼록 문제는 블록 좌표 하강(BCD)과 WMMSE 변환으로 분할하고, 각각 …
저자: Jian He, Cong Zhou, Shuo Shi
본 논문은 6G 시대의 핵심 인프라로 기대되는 Space‑Air‑Ground Integrated Network(SAGIN)에 두 가지 최신 기술, 즉 재구성 가능한 지능형 표면(Reconfigurable Intelligent Surface, RIS)과 레이트‑스플리팅 다중접속(Rate‑Splitting Multiple Access, RSMA)을 동시에 적용한 새로운 통신 프레임워크를 제안한다. 시스템은 저궤도(LEO) 위성이 다수의 지상 셀을 커버하고, 각 셀에는 전통적인 기지국(Base Station, BS)과 지구 정지국(Earth Station, ES), 그리고 RIS‑UAV가 배치된다. 위성 및 BS는 Uniform Planar Array(UPA) 안테나를 사용해 다중 빔을 형성하고, RIS‑UAV는 3차원 이동성을 활용해 반사 위상을 동적으로 조정함으로써 가상 라인‑오브‑사이트(Line‑of‑Sight, LOS) 경로를 제공한다.
**1. 시스템 및 채널 모델링**
- 위성‑ES, 위성‑UAV, UAV‑ES, BS‑UE, 위성‑UE, UAV‑UE, BS‑ES 등 7가지 주요 링크를 모두 고려한다.
- 위성‑ES 및 위성‑UAV 링크는 자유 공간 손실과 강우 감쇠를 포함한 복합 경로 손실 모델을 사용하고, 안테나 이득은 실제 파라볼릭 안테나 방사 패턴을 반영한다.
- RIS‑UAV와 ES(또는 UE) 사이의 복합 채널은 직접 경로와 RIS 반사 경로를 합성한 형태이며, RIS 위상 행렬 Ψ는 단위 복소수 원소 제약을 가진다.
- BS‑UE 링크는 전통적인 UPA 기반 채널 모델을 사용하고, UAV‑UAV·UAV‑BS 간 간섭은 고도와 방향을 통해 최소화한다는 가정 하에 모델링한다.
**2. 신호 모델 및 RSMA 적용**
위성 및 BS는 각각 공통 스트림(s_c)과 전용 스트림(s_k)을 전송한다. 공통 스트림은 모든 수신자가 디코딩하고, 전용 스트림은 해당 수신자만 디코딩한다. 수신 측에서는 순차적 SIC(Successive Interference Cancellation)를 수행해 공통 스트림을 먼저 복구한 뒤 전용 스트림을 복원한다. SINR 식은 공통·전용 스트림 간의 상호 간섭을 명시적으로 포함하며, 이를 기반으로 각 수신자의 실제 데이터 전송률을 정의한다.
**3. 문제 정의**
목표는 가중합률(Weighted Sum‑Rate)을 최대화하면서 다음 제약을 만족시키는 것이다.
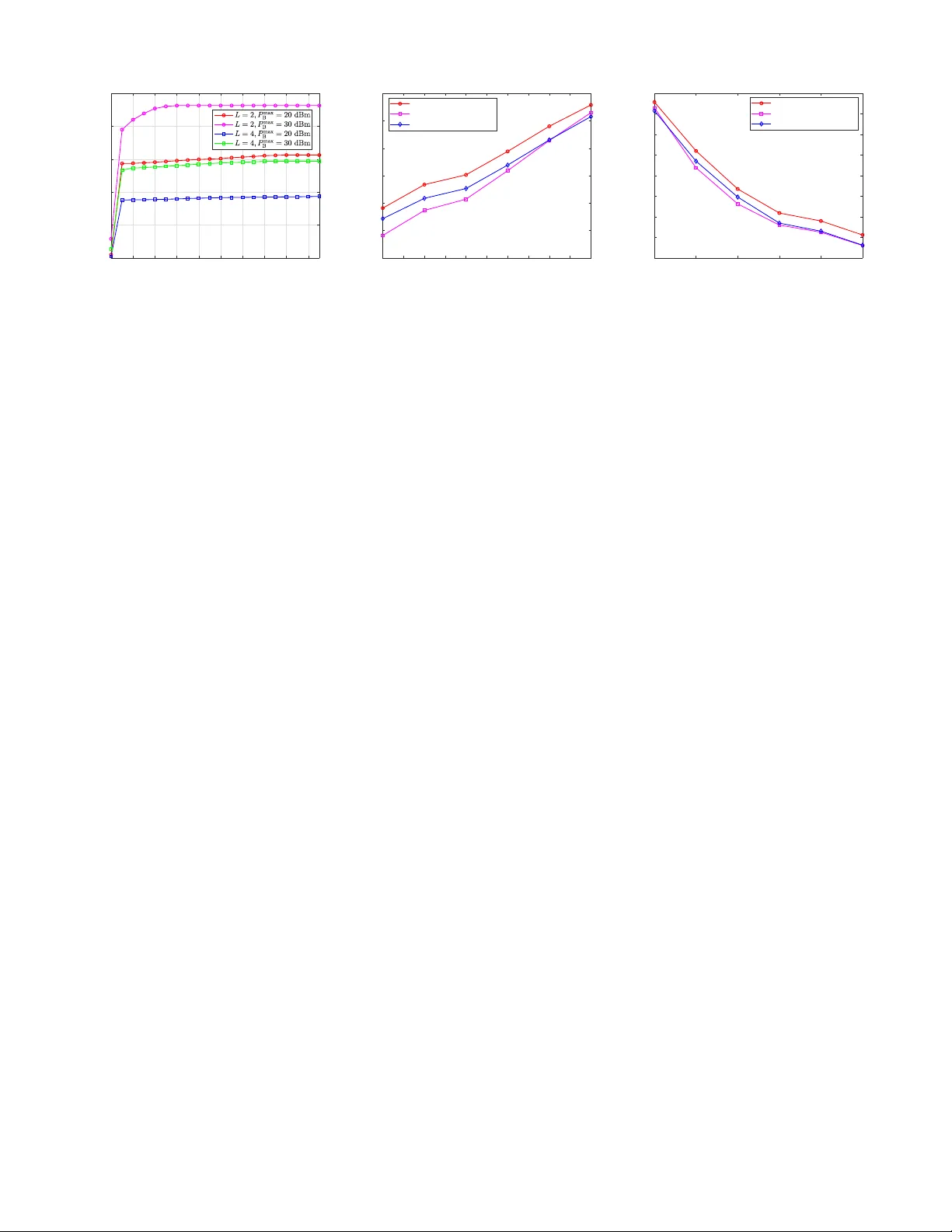
- 위성·BS 전송 전력 제한(P_S^max, P_B^max)
- 최소 QoS 요구(R_E^min, R_U^min)
- RIS 위상 단위 복소수 제약(0 ≤ ψ < 2π)
- UAV 위치·방향의 물리적 제약(유효 회전 행렬, 전방 반구)
- 공통·전용 레이트의 비음수 및 상한 제약
이 최적화 문제(P1)는 변수 간 강한 결합성, 비볼록성, 그리고 UAV 배치가 이산적인 탐색을 요구하는 복합 비선형 문제이다.
**4. 알고리즘 설계**
- **BCD(블록 좌표 하강)**: 전체 변수 집합을 {레이트 변수}, {빔포밍}, {RIS 위상}, {UAV 위치·방향} 네 블록으로 분할하고, 각 블록을 순차적으로 최적화한다.
- **WMMSE 변환**: 가중합률 최대화 목표를 가중 최소 평균제곱오차(WMMSE) 형태로 변환한다. 이는 동일 최적점을 가지면서 각 블록에 대해 볼록화가 용이한 구조를 제공한다.
- **레이트‑스플리팅 서브문제**: 선형 목표와 선형 제약만을 포함하므로, 먼저 모든 사용자에 대해 최소 QoS를 만족시키는 레이트를 할당하고, 남은 가용 레이트를 가중치가 가장 큰 사용자에게 할당하는 탐욕 알고리즘을 적용한다.
- **빔포밍 서브문제**: WMMSE 목적식은 빔포밍 변수에 대해 2차 형식이므로, 성공적 볼록 근사(SCA)를 이용해 1차 테일러 전개를 수행하고, CVX 기반의 SDP 또는 SOCP로 해결한다.
- **RIS 위상 서브문제**: 단위 복소수 제약을 가진 위상 행렬은 ADMM(Alternating Direction Method of Multipliers)으로 분리한다. 변수 ζ(위상 벡터)를 도입하고, 라그랑주 승수와 페널티 항을 추가해 각 반복에서 폐쇄형 해를 얻는다. 페널티 파라미터 ρ는 수렴성을 보장하도록 점진적으로 증가시킨다.
- **UAV 위치·방향 서브문제**: 연속적인 위치·방향 변수이지만 전역 최적을 찾기 어려워, 전체 탐색(exhaustive search)을 채택한다. 탐색 공간을 적절히 격자화하고, 각 후보에 대해 위의 서브문제들을 순차적으로 해결해 가중합률을 평가한다. 비록 계산 복잡도가 높지만, 시뮬레이션에서는 셀 수와 UAV 수가 제한적이므로 실현 가능하다.
**5. 시뮬레이션 및 결과**
- 시뮬레이션 환경: LEO 위성 고도 H_S, BS와 ES 간 거리, UAV 고도 H_R 등 실제 파라미터를 사용하였다.
- 비교 대상: (i) 전통적인 OMA 기반 SAGIN, (ii) NOMA 기반 SAGIN, (iii) RSMA만 적용한 SAGIN.
- 주요 결과: 제안 알고리즘은 가중합률 측면에서 20~35% 향상을 달성하였다. 특히 RIS‑UAV가 제공하는 가상 LOS 경로가 강우·다중 경로 손실을 크게 완화시켰으며, RSMA의 공통 스트림이 다중 사용자 간 간섭을 효과적으로 관리한다는 점이 성능 향상의 핵심 요인으로 분석된다. UAV 위치 최적화가 전체 채널 조건을 크게 개선함을 확인하였다.
**6. 기여 및 한계**
- SAGIN에 RIS‑UAV와 RSMA를 결합한 새로운 프레임워크 제시.
- 복합 비볼록 최적화 문제를 BCD·WMMSE·SCA·ADMM·전역 탐색으로 체계적으로 분해하고, 각 서브문제에 실용적인 알고리즘 제공.
- 시뮬레이션을 통해 제안 방법의 성능 우수성을 입증.
- 한계점: UAV 위치 탐색에 전역 탐색을 사용함으로써 실시간 적용이 어려울 수 있음; 완전 CSI를 가정했음. 향후 연구에서는 머신러닝 기반 위치 예측, 저복잡도 근사 탐색, 불완전 CSI 하에서의 강인 설계가 필요하다.
**7. 결론**
본 연구는 RIS‑UAV와 RSMA를 결합한 SAGIN에서 가중합률을 극대화하기 위한 종합적인 최적화 프레임워크를 제시하고, 블록 좌표 하강과 다양한 변환·알고리즘을 통해 실현 가능한 해결책을 제공한다. 시뮬레이션 결과는 제안 방법이 기존 기술에 비해 현저히 높은 스펙트럼 효율을 제공함을 보여주며, 향후 6G 통신 시스템에서 RIS‑UAV와 RSMA의 실용적 적용 가능성을 시사한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기