수축과 구간 분석을 이용한 인증 신경망 제어기 학습
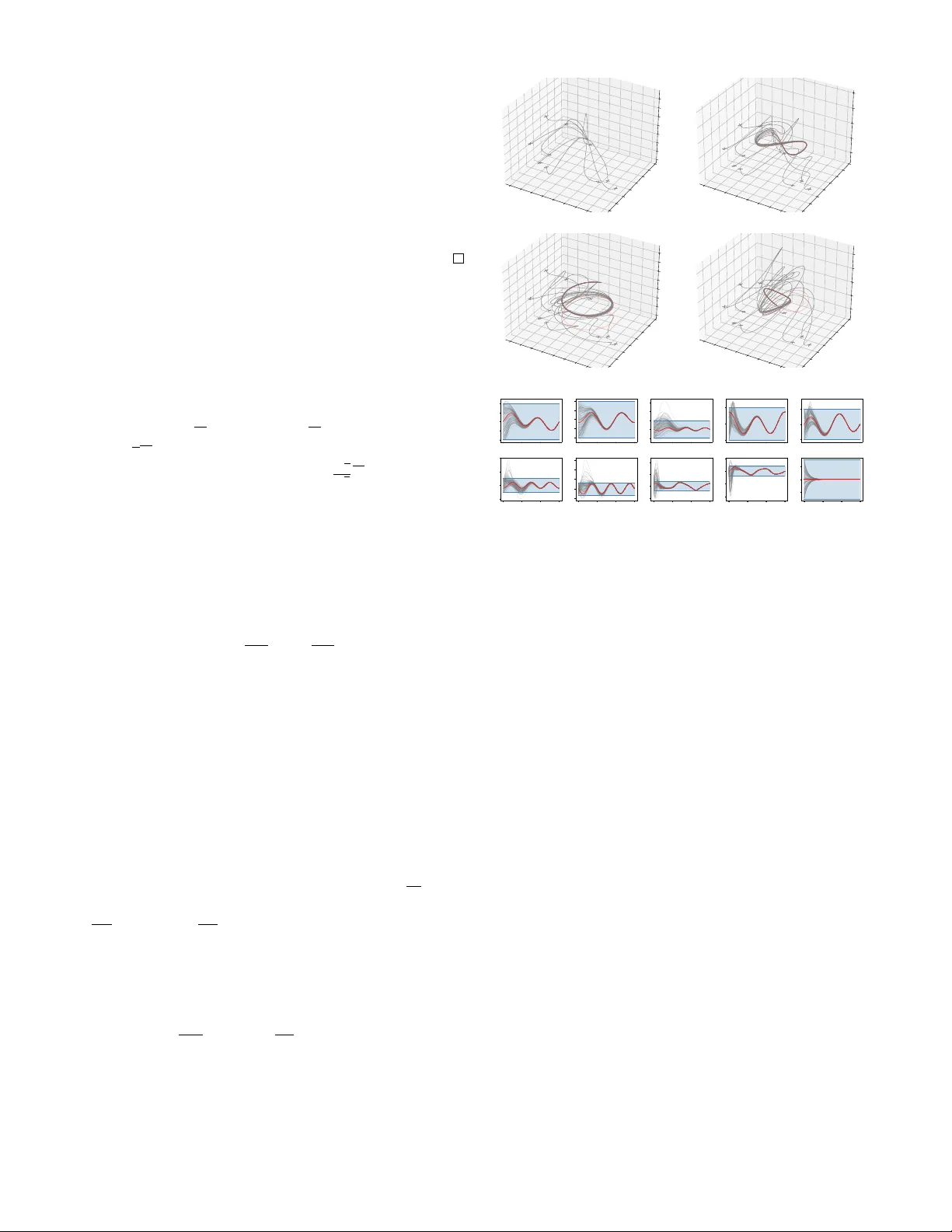
본 논문은 신경망 기반 제어기와 신경형 리만 계량(metric)을 동시에 학습하면서, 구간 분석과 비대칭 수축 행렬을 이용해 전체 상태 구간에 대한 수축 보장을 형식적으로 검증하는 프레임워크를 제시한다. 10차원 쿼드로터 모델에 적용해 10분 이내에 정책, 계량, 그리고 10차원 수축 영역을 동시에 인증한다.
저자: Akash Harapanahalli, Samuel Coogan, Alex
본 논문은 딥러닝 기반 제어기의 표현력과 전통적인 제어 설계의 안전성을 결합하려는 최신 연구 흐름에 기여한다. 저자들은 비선형 시스템 \dot{x}=f_{ol}(t,x,u) 에 대해, 피드백 정책 π(x)와 리만 계량 M(x)=Θ(x)ᵀΘ(x) 을 동시에 학습하면서, 폐루프 시스템 \dot{x}=f_{ol}(t,x,π(x)) 이 전역적으로 수축(contraction)함을 형식적으로 보증하는 프레임워크를 제시한다.
핵심 아이디어는 기존의 대칭형 라미아니안 S(t,x)⪯0 조건을 직접 바운드 전파에 적용하면 변수 복제에 따른 의존성 손실이 크게 발생한다는 점이다. 이를 해결하기 위해 저자들은 비대칭 수축 행렬 G(t,x) 을 정의한다. G 은 Θ 와 ∂fπ/∂x 의 곱셈 순서를 바꾸어, 로그노름 μ₂(G) 이 S 의 반대칭 부분과 정확히 2배 관계에 있게 만든다. 비대칭 형태는 바운드 전파 시 Θ·∂fπ·Θ 와 Θ·∂fπ·Θ 사이의 상호작용을 그대로 보존하므로, 구간 해석 시 과도한 보수성을 피할 수 있다.
구간 해석 단계에서는 입력 구간 X⊂ℝⁿ 에 대해 G 의 구간 hull
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기