해양 선박 트래킹을 위한 확률 안전 제어와 보상 설계
본 논문은 바람·파도 등 불규칙한 외란에 노출되는 해양 선박의 궤적 추적 문제를 다룬다. 비선형 선박 조종 모델을 명시적 추적 제어와 함께 선형화하고, 이를 확률적 선형 시스템으로 변환한다. 확률적 제로링 제어 장벽 함수(ZCBF)를 이용해 안전 영역 내에 머무를 확률을 분석하고, 선형·비선형 보상기를 설계해 안전 확률을 크게 향상시킨다. 시뮬레이션을 통해 설계된 보상기의 효과를 검증한다.
저자: Too Matsuo, Yuki Nishimura, Kenta Hoshino
본 논문은 해양 선박이 비선형 동역학을 가지고 바람·파도와 같은 불규칙한 외란에 노출되는 상황에서, 목표 궤적을 정확히 추적하면서도 안전 영역을 확률적으로 보장하는 제어 전략을 제시한다. 연구는 크게 네 부분으로 구성된다.
1. **시스템 모델링**
- Fossen의 선박 조종 모델을 기반으로 전역 좌표계에서의 위치(x_glo, y_glo)와 자세(θ_glo) 방정식을 제시한다.
- 선박의 중심이 아닌 앞쪽 피벗점(c = –1 m)을 기준으로 모델을 재구성해 상태공간 형태(𝑥̇ = f(x)+g(x)u) 로 변환한다.
- 목표 궤적(x_r, y_r, θ_r)와 제어 입력(v_r, ω_r)을 정의하고, 오류 상태(x_e, y_e, θ_e)를 기하학적으로 도출한다.
- 오류 역학을 전개한 뒤, 제어 입력을 v_s, ω_s 로 재정의해 오류가 0이 되도록 설계한다.
2. **선형화 및 LQ 제어 설계**
- 초기 오류가 작다고 가정하고 1차 테일러 전개를 통해 선형 모델 𝑥̇ = A𝑥 + Bu 를 얻는다.
- A와 B는 선박의 전방 속도(v_r=0), 회전 반경(c=–1) 등 물리적 파라미터에 의해 구체화된다.
- 선형 시스템에 대해 LQ 최적제어를 적용, 비용 행렬 Q′와 R을 설정해 Riccati 방정식을 풀어 P와 최적 피드백 K를 도출한다.
- 이 피드백을 적용하면 외란이 없을 때 오류는 지수적으로 수렴한다.
3. **확률 안전 분석 및 보상 설계**
- 가우시안 백색 잡음 dw(t)와 확산 행렬 G(σ_x,σ_y,σ_θ)를 시스템에 추가해 확률 미분 방정식 dx = (A−BK)x dt + G dw 로 만든다.
- 안전 집합 χ 를 Lyapunov 함수 V(x)=xᵀPx 를 이용해 {x | V(x) ≤ M} 로 정의하고, ZCBF h(x)=M−xᵀPx 로 표현한다.
- Theorem 2에 따라, 초기 상태가 χ_{h>μ} (μ∈(0,M)) 안에 있으면 확률 1−e^{−bμ} 로 전체 시간 동안 χ 안에 머문다. 여기서 b는 시스템 행렬, 확산 행렬, P와 Q의 고유값을 이용해 계산되는 양수 파라미터이다.
- **선형 보상** u_com = −R'^{-1}BᵀPx 를 추가하면 b에 추가 항 b⁺ = tr(GᵀB R' Bᵀ G) 가 더해져 안전 확률이 크게 상승한다. R'을 15·I 로 선택해 b⁺≈5.79 를 얻어 1−e^{−(b+b⁺)μ}=0.997 의 높은 안전성을 달성한다.
- **비선형 보상**은 γ(x,b') = 2xᵀP(f+g u_tra + b'GGᵀPx)+GᵀPG 를 정의하고, γ>0 일 때 보상 신호 ϕ_s(x)를 계산한다. h(x) 구간에 따라 ϕ_s, ϕ'_s 를 스위칭하여 u_nlc 를 구성한다. 이 방식은 큰 외란이 순간적으로 발생해도 상태가 안전 영역을 벗어나지 않도록 비선형적인 억제 효과를 제공한다.
4. **시뮬레이션 검증**
- 파라미터: c=3 m, ω_r=0.1 rad/s, v_r=1 m/s, Q′와 R을 지정해 P와 K를 계산한다.
- 확산 행렬 G을 (0.08,0.08,0.08)ᵀ 로 설정하고, 안전 한계 M=10, μ=1 로 두어 b=0.0043 를 얻는다. 이는 보상 없이 안전 확률이 0.0043 에 불과함을 의미한다.
- 선형 보상 적용 시 b_total≈5.79 로 안전 확률이 0.997 로 상승한다.
- 비선형 보상 적용 시 b' =3, M' =9 로 설정해 안전 확률 0.950 을 얻는다.
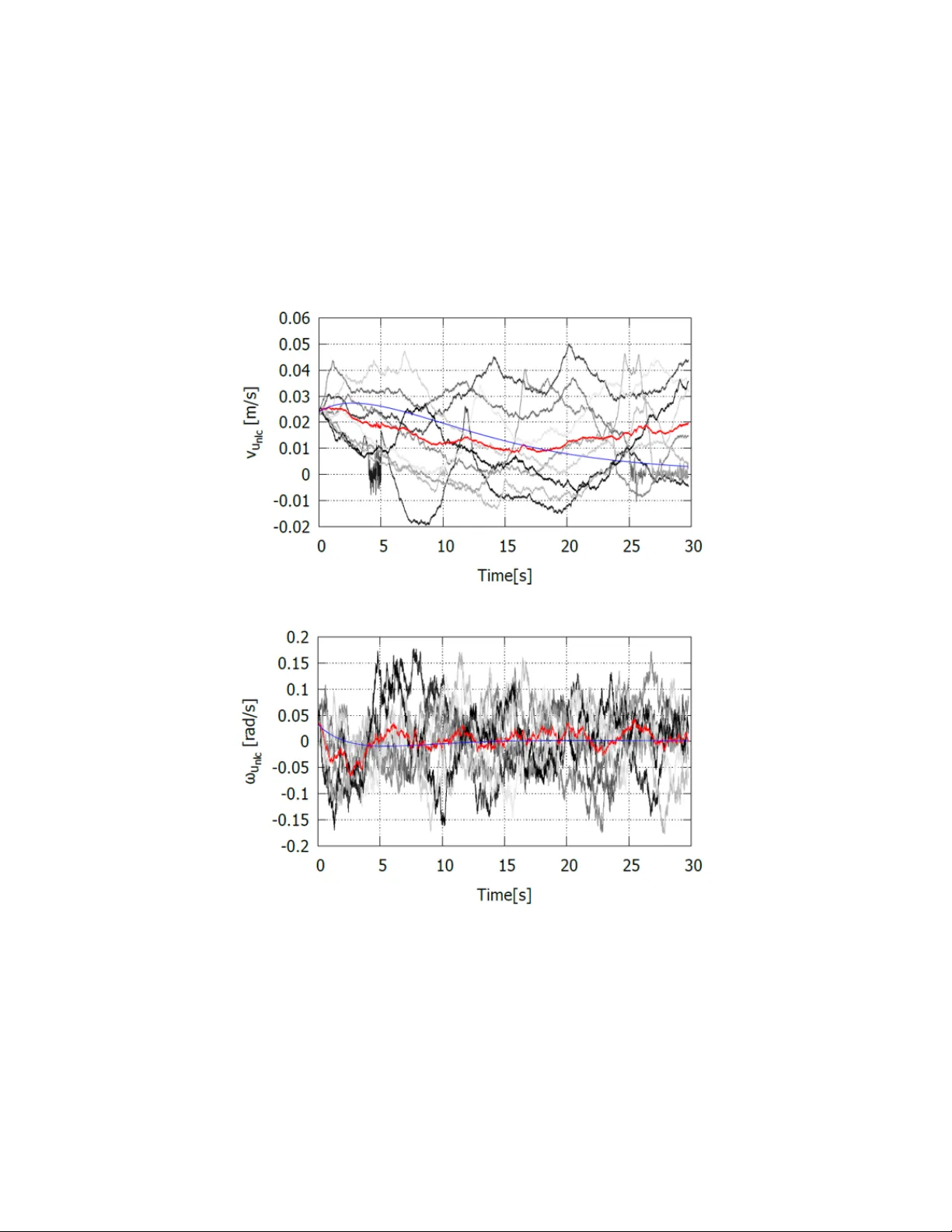
- 10개의 잡음 시뮬레이션과 무잡음 경우를 비교했으며, LQ만 적용했을 때는 오류 궤적이 안전 경계 밖으로 탈출하고, 선형·비선형 보상 적용 시 모두 안전 집합 내에 머물렀다. 그래프(Fig. 4‑13)에서 각 경우의 평균 궤적과 샘플 경로가 명확히 구분된다.
**결론 및 의의**
- 확률적 ZCBF를 이용해 안전 확률을 정량화하고, 보상기를 통해 그 확률을 크게 향상시킬 수 있음을 보였다.
- 확산 계수 σ가 안전 조건에 직접 등장함으로써 외란 특성을 제어 설계에 명시적으로 반영한다는 새로운 관점을 제공한다.
- 선형 보상은 계산이 간단하고 높은 안전 확률을 제공하지만, 비선형 보상은 큰 외란 상황에서도 연속적인 제어를 유지한다는 장점이 있다.
- 본 연구는 해양 자동화, 자율 선박, 해양 로봇 등 안전이 중요한 해양 분야에 적용 가능하며, 향후 실제 해양 환경에서의 실험 및 다중 선박 협동 제어로 확장될 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기