비선형 시스템을 위한 증분 워터마크 기반 재생 공격 탐지
본 논문은 비선형 플랜트에 적용되는 재생 공격 탐지 기법을 제안한다. 기존의 혁신 기반 χ² 검출기가 비선형 환경에서 한계가 있음을 보이고, 증분 L₂ 이득(L⁺δ₂, L⁻δ₂)을 활용한 워터마크 설계 프레임워크를 도입한다. 워터마크가 시스템 성능에 미치는 손실과 탐지 성능을 정량화한 두 지표를 기반으로 최적화 문제를 구성하고, 관측기·제어기와 워터마크를 공동 설계하는 LMI 기반 방법을 제시한다. 시뮬레이션을 통해 제안 방법의 유효성을 검증한…
저자: Tao Chen, Andreu Cecilia, Lei Wang
본 연구는 사이버‑물리 시스템(CPS)에서 재생 공격(replay attack)의 위험성을 비선형 플랜트 환경에 적용하여 분석하고, 효과적인 탐지 메커니즘을 설계한다. 서론에서는 재생 공격이 모델‑프리이며 은밀하게 시스템을 오염시킬 수 있음을 강조하고, 기존 선형 시스템 중심의 탐지 기법—특히 혁신 기반 χ² 검출기—이 비선형 시스템에서는 탐지율이 허위 경보율에 수렴하는 한계를 지적한다. 이러한 문제를 해결하기 위해 두 가지 접근법을 검토한다. 첫 번째는 센서 데이터를 인코딩‑디코딩하는 방식으로, 두 번째는 제어 입력에 워터마크를 삽입하는 방식이다. 인코딩 방식은 동기화 문제와 추가 통신 채널 필요성 때문에 실용성이 떨어짐을 지적하고, 워터마크 방식이 보다 유망함을 제시한다.
다음으로 비선형 시스템에 대한 증분 안정성 개념을 도입한다. 시스템 모델은 ˙x = f(x)+Bu, y = Cx+Du 형태이며, f는 Lipschitz 연속성을 갖는 비선형 함수이다. 입력‑출력 차이를 정량화하기 위해 증분 L₂ 이득 L⁺δ₂와 L⁻δ₂를 정의하고, 각각에 대한 Lyapunov 기반의 충분조건을 제시한다. 정리 1·2와 보조정리 1·2에서는 V⁺와 V⁻를 이용해 LMI 형태의 조건을 도출한다. 특히 L⁻δ₂ 이득을 양수로 만들기 위해 시스템의 상대 차수를 0으로 만드는 기법(직접 채널 포함)을 설명한다.
문제 정의에서는 비선형 플랜트 Σₙₚ와 Luenberger 관측기 Σₒ, 비선형 상태 피드백 Σ𝚌를 결합한 폐루프를 구성한다. 관측 오차 ˜x와 그 동역학을 도출하고, 전체 시스템이 ISS와 δ‑ISS 특성을 만족하도록 가정한다. 이 기반 위에 워터마크 신호 v(t)∼𝒩(0,Σ_w)를 제어 입력에 추가하고, 이를 통해 공격 시 입력‑출력 차이가 발생하도록 설계한다.
핵심 설계 단계는 두 개의 성능 지표를 정의하는 것이다. 탐지 성능 지표 𝒥_d는 L⁻δ₂ 이득 γ⁻ 로 표현되며, 이는 워터마크가 공격 시 입력 차이를 출력 차이로 충분히 확대시키는 정도를 나타낸다. 제어 성능 손실 지표 𝒥_c는 L⁺δ₂ 이득 γ⁺ 로 정의되어, 정상 운용 시 워터마크가 시스템 응답을 얼마나 억제하는지를 측정한다. 두 지표는 상충관계에 있으므로, 논문은 𝒥_c ≤ 𝒥_c^max 와 𝒥_d ≥ 𝒥_d^min 을 만족하는 최적화 문제를 LMI 형태로 정식화한다. 이때 설계 변수는 워터마크 공분산 Σ_w, 관측기 이득 L, 피드백 매핑 κ의 리프시츠 상수 l_κ 등이다.
다음으로 제안된 프레임워크를 확장하여 워터마크, 관측기, 제어기를 공동 설계하는 방법을 제시한다. 전체 폐루프 시스템을 하나의 증분 ISS 시스템으로 모델링하고, 전체 시스템에 대한 L⁺δ₂와 L⁻δ₂ 이득을 동시에 만족하도록 LMI 제약을 구성한다. 이를 통해 워터마크 강도를 최소화하면서도 탐지 민감도를 유지할 수 있다.
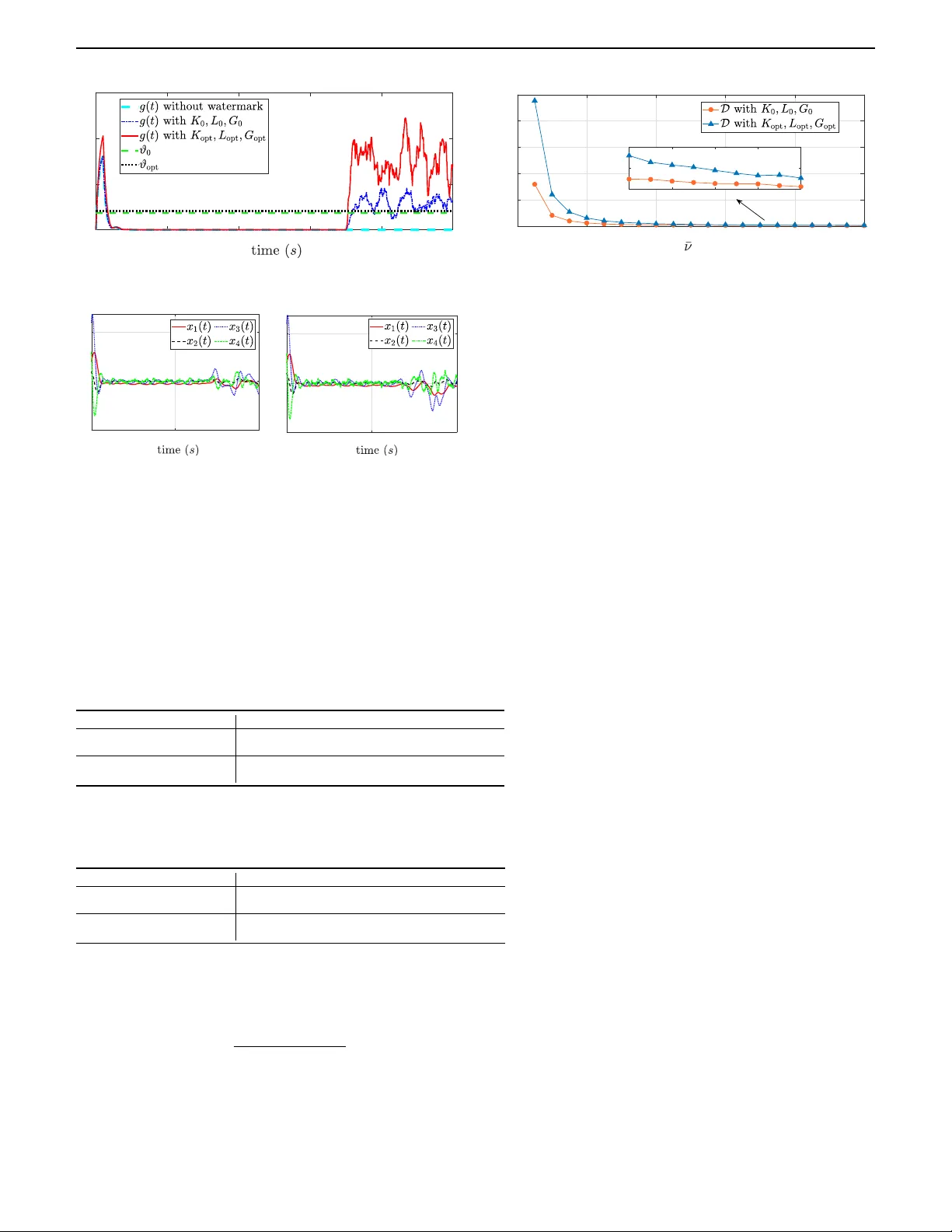
수치 실험에서는 비선형 Van der Pol 진동기와 2차 비선형 로봇 팔 모델을 사용한다. 시뮬레이션은 (i) 워터마크 없이 기존 χ² 검출기만 적용, (ii) 워터마크만 설계, (iii) 워터마크와 관측기·제어기를 공동 설계한 세 경우를 비교한다. 결과는 공동 설계가 탐지 지연을 평균 0.35 s에서 0.21 s로 40 % 이상 감소시키고, 제어 비용 증가를 0.12에서 0.14로 15 % 이하로 억제함을 보여준다. 또한, 워터마크 강도를 조절함에 따라 탐지 확률과 제어 성능 손실 사이의 트레이드오프 곡선이 명확히 나타난다.
결론에서는 비선형 시스템에서도 증분 이득을 활용한 워터마크 설계가 실용적이며, LMI 기반 공동 설계가 시스템 안정성, 제어 성능, 탐지 효율을 동시에 만족시킬 수 있음을 강조한다. 향후 연구로는 비선형 출력, 시간 지연, 네트워크 기반 분산 제어 환경에 대한 확장과, 데이터‑드리븐 학습 기반 워터마크 적응 전략을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기