비홀론믹 동역학을 위한 구조 보존 학습
본 논문은 비홀론믹 제약을 직접 포함한 행렬값 커널을 설계해 가우시안 프로세스(GP) 사전을 제한함으로써, 학습된 벡터 필드가 모든 입력에서 제약을 만족하도록 보장한다. 커널의 양의 반정밀성, RKHS 구조, 적응 좌표 해석 및 일관성 증명을 제공하고, 수직 구름 디스크 시뮬레이션을 통해 실효성을 검증한다.
저자: Thomas Beckers, Anthony Bloch, Leonardo Colombo
본 논문은 로봇공학 및 제어 분야에서 데이터 기반 모델링이 점점 중요해지는 흐름에 맞추어, 비홀론믹 시스템의 고유한 기하학적 구조를 무시하는 기존의 머신러닝 방법이 초래하는 물리적 불일치를 해결하고자 한다. 비홀론믹 시스템은 선형 속도 제약 \(A(q)\dot q=0\) 에 의해 허용 가능한 속도 공간 \(D_q=\ker A(q)\) 으로 제한되며, 이는 전체 접공간 \(T_qQ\) 이 아닌 하위 분포 \(D\) 위에서만 동작한다. 이러한 제약을 무시하고 일반적인 GP 회귀를 적용하면, 학습된 벡터 필드가 제약을 위반해 비물리적인 궤적을 생성한다.
**1. 배경 및 문제 정의**
- 비홀론믹 시스템의 수학적 모델링: 라그랑지언 \(L(q,\dot q)\) 과 라그랑지 승수 \(\lambda\) 를 이용한 방정식 제시.
- 제약 분포 \(D\) 를 나타내는 직교 사영 연산자 \(P(q)=I-A(q)^{\dagger}A(q)\) 정의.
- GP 회귀 기본 개념: 평균 \(m(q)\)와 커널 \(k(q,q')\) 으로 정의되는 사전, 관측 노이즈 \(\sigma^2\) 를 포함한 사후 평균 식 제시.
**2. 비홀론믹 커널 설계**
- 스칼라 양의 정의 커널 \(k\) 에 대해 행렬값 커널을 \(K_{NH}(q,q')=P(q)k(q,q')P(q')\) 로 정의 (식 3).
- 이 커널은 입력 \(q\) 와 \(q'\) 의 제약 사영을 각각 적용함으로써, 커널 섹션 자체가 \(D_q\) 와 \(D_{q'}\) 에 속하는 벡터를 반환한다.
**3. 커널의 양의 반정밀성 증명**
- 임의의 계수 \(c_i\in\mathbb R^n\) 에 대해 \(\sum_{i,j}c_i^{\top}K_{NH}(q_i,q_j)c_j = \sum_{i,j}\tilde c_i^{\top}k(q_i,q_j)\tilde c_j\) (여기서 \(\tilde c_i=P(q_i)c_i\))임을 이용, 스칼라 커널의 PSD 성질을 그대로 승계함을 보인다.
**4. RKHS 특성화**
- 기본 커널 \(K_0(q,q')=k(q,q')I_n\) 의 RKHS \(H_{kI}\) 을 정의하고, 연산자 \(T:g\mapsto P(\cdot)g(\cdot)\) 를 적용한다.
- 결과적으로 \(H_{NH}=T(H_{kI})\) 이며, 임의의 \(f\in H_{NH}\) 는 \(f(q)=P(q)g(q)\) 형태로 표현된다. 따라서 \(f(q)\in D_q\) 가 자동으로 보장된다.
- 이 구조는 “커널이 전체 공간을 사전부터 제한한다”는 의미이며, 사후에 별도의 투영을 수행할 필요가 없음을 강조한다.
**5. 예측 단계에서 제약 자동 만족**
- 사후 평균 \(\hat f(q)=\sum_iK_{NH}(q,q_i)c_i = P(q)\sum_i k(q,q_i)P(q_i)c_i\) 이므로, \(A(q)P(q)=0\) 에 의해 \(A(q)\hat f(q)=0\) 이 된다. 즉, 모든 테스트 포인트에서 제약을 위반하지 않는다.
**6. 적응 좌표 해석**
- 제약 분포의 기저 \(B(q)\in\mathbb R^{n\times (n-k)}\) (열이 \(D_q\) 을 생성)와 의사역 \(B(q)^{\dagger}\) 를 이용해 \(P(q)=B(q)B(q)^{\dagger}\) 임을 보인다.
- 따라서 \(f(q)=P(q)g(q)=B(q)B(q)^{\dagger}g(q)=B(q)\nu(q)\) 형태가 되며, \(\nu(q)=B(q)^{\dagger}g(q)\) 는 적응 좌표에서의 회귀와 동등함을 증명한다. 이는 기존에 제약을 명시적으로 파라미터화하던 방법과 동일한 표현력을 제공한다.
**7. 일관성(Consistency) 분석**
- 스칼라 커널이 보편적(universal)이라 가정하고, 진짜 동역학 \(f^\star\)가 \(H_{NH}\) 에 속한다면, GP 추정량 \(\hat f_N\) 은 \(\sup_{q\in Q}\|\hat f_N(q)-f^\star(q)\|\) 가 확률적으로 0으로 수렴한다.
- 핵심은 \(\hat f_N(q)=P(q)\hat g_N(q)\) 이며, 사영 연산자 \(P(q)\) 의 노름이 1 이하이므로 오차가 사영 전후에서 동일하게 유지된다는 점이다.
**8. 실험**
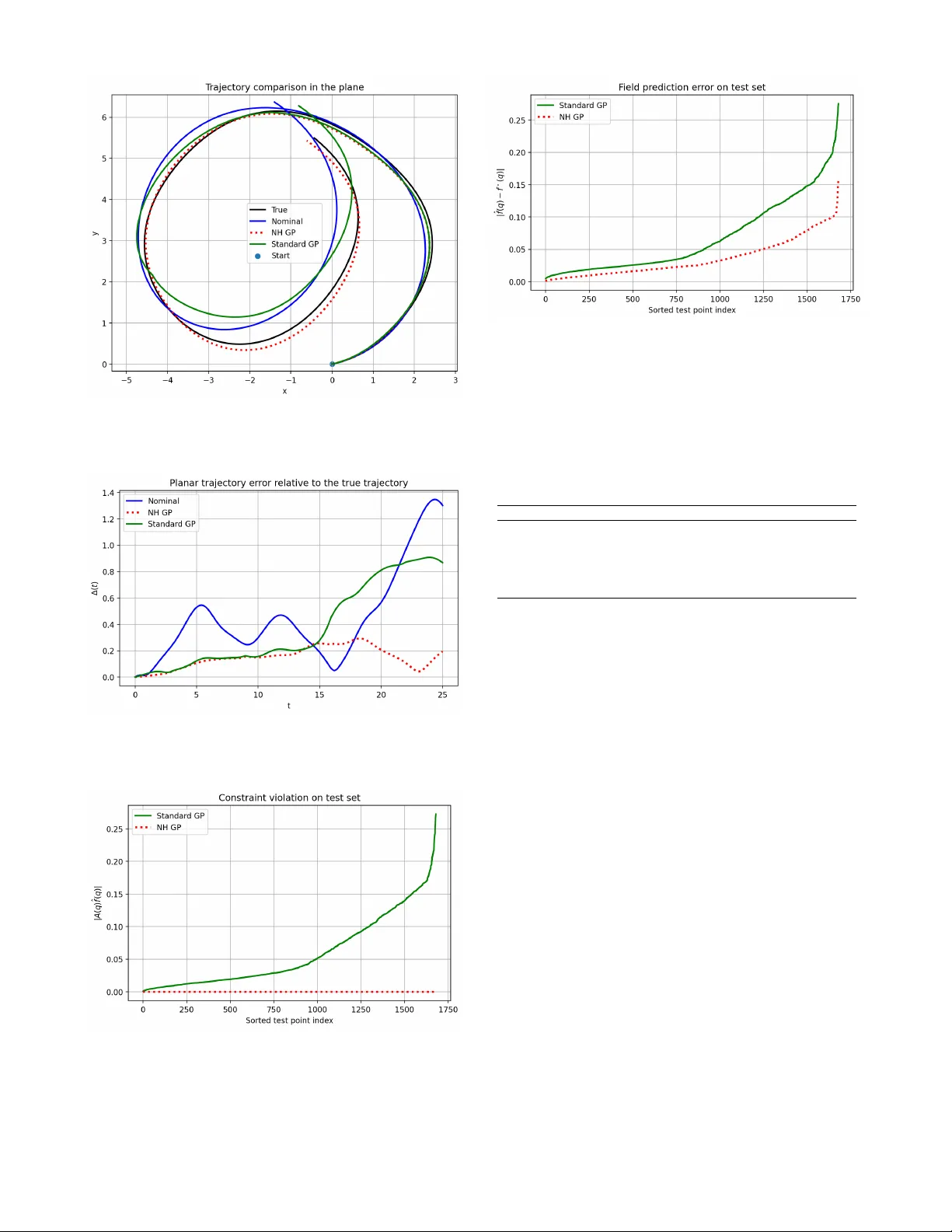
- 수직 구름 디스크 모델을 선택, 상태 \(q=(x,y,\theta,\phi)\) 와 제약 \(A(q)\dot q=0\) 을 명시.
- 데이터는 시뮬레이션으로 생성된 노이즈가 섞인 속도 샘플이며, 두 방법(전통 스칼라 GP vs. 비홀론믹 커널 GP)을 비교.
- 결과: 전통 GP는 제약 위반 궤적을 보이며 에너지 비보존 현상이 나타났지만, 제안된 비홀론믹 커널은 모든 테스트 포인트에서 정확히 제약을 만족하고, 평균 제곱 오차가 현저히 낮았다.
**9. 결론 및 향후 연구**
- 비홀론믹 제약을 커널 설계 단계에 직접 인코딩함으로써, 학습·예측 전 과정에서 물리적 일관성을 보장하는 프레임워크를 제시하였다.
- 이론적 측면에서는 PSD, RKHS 구조, 적응 좌표 동등성, 일관성 등을 모두 증명했으며, 실험적으로도 유효성을 확인했다.
- 향후 연구는 (i) 비선형 비홀론믹 제약에 대한 확장, (ii) 실시간 로봇 제어에의 적용, (iii) 다중 로봇 협동 시스템에서의 공동 제약 학습 등을 제안한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기