입력 제약을 고려한 MPC 기반 쿼드로터 궤적 추적 및 반전 전역 안정성 보장
본 논문은 입력 제약을 포함한 쿼드로터의 궤적 추적 문제를 해결하기 위해 외부 루프에서는 시간 가변 제약을 직접 적용할 수 있는 스케일 팩터를 도입한 모델 예측 제어(MPC)를, 내부 루프에서는 반전 기하학적 제어기를 사용해 반전 전역 지수 안정성을 확보한다. 두 루프를 계층적으로 결합한 뒤, 전체 시스템이 반전 전역 점근 안정(USGAS)임을 증명하고 시뮬레이션으로 성능을 검증한다.
저자: Qian Yang, Miaomiao Wang, Abdelhamid Tayebi
본 논문은 입력 제약을 갖는 쿼드로터 UAV의 궤적 추적 문제를 해결하기 위해, 외부‑내부 이중 루프 구조에 기반한 새로운 제어 프레임워크를 제안한다. 먼저 시스템 모델을 정의한다. 위치 p, 속도 v, 자세 R, 각속도 ω를 포함한 12차 상태 방정식(1)을 사용하고, 추력 T와 토크 τ를 제어 입력으로 둔다. 입력 제약은 0 ≤ T ≤ T_max 형태이며, 토크는 별도 제한이 없다고 가정한다. 목표 궤적 r(t)는 4차 미분까지 유계이며, 이를 기반으로 오류 상태 ˜p, ˜v를 정의한다. 오류 동역학(2)은 가상 입력 µ = g e₃ – T R e₃ – r̈ – D ṙ 로 표현되며, µ를 적절히 설계하면 위치와 속도 오류를 수렴시킬 수 있다.
외부 루프 설계는 µ를 두 단계로 나눈다. 첫 번째 단계에서 µ_d를 원하는 가상 입력으로 정의하고, 이를 통해 추력 T와 원하는 자세 R_d를 추출한다. 자세 추출 과정에서 z축은 추력 방향으로 정규화되고, yaw 각 ψ_d를 이용해 x축을 정의한다. 이때 µ_d는 제약 B(·)를 만족해야 하며, 이는 추력의 양과 방향이 물리적 한계 내에 있음을 보장한다. 레마 2는 이러한 제약 하에서 T가 항상 양수임을 증명한다. 또한 T ≤ T_max 제약을 만족하도록 µ_d의 크기를 B₂(·)로 제한한다. 최종적으로 µ_d의 허용 범위는 B(·)=min{B₁, B₂} 로 정의된다.
시간 가변 제약을 직접 적용하기 위해, 기존 연구와 달리 스케일 팩터 α를 도입한 확장 시스템(12)을 제시한다. 여기서 u는 보강된 가상 입력이며, µ_d와 η는 각각 1/γ 비율로 α·u와 α·η에 수렴하도록 설계된다. 시스템을 각 축별 독립 스칼라 서브시스템(13)으로 분해하고, ZOH 이산화를 통해 이산 시간 상태 방정식(15)을 얻는다. 행렬 A_i와 B_i는 연속 시스템 행렬 A_i0, B_i0을 행렬 지수와 적분으로 정확히 계산한다.
제약 적용을 위해 µ_d의 각 성분에 |µ_d_i| ≤ B(·)/√3 라는 보수적 경계(14)를 부여한다. 레마 3은 B(·)가 시간에 대해 리프시츠 연속임을 보이며, 레마 4는 γ와 α가 (19) 조건을 만족하면 초기 조건 |µ_d(0)|, |η(0)| ≤ Δ₀ 일 때 모든 샘플링 구간에서 |µ_d|, |η| ≤ Δ_k 가 유지됨을 증명한다. 여기서 Δ_k는 각 구간의 최소 제약값이다. 따라서 보조 입력 u가 Δ_k 이하이면 µ_d가 물리적 제약을 위반하지 않으며, 자세 추출이 항상 가능하고 액추에이터 포화도 방지된다.
내부 루프는 하이브리드 기하학적 제어기를 사용한다. 자세 오차를 SO(3) 위의 로그 매핑으로 정의하고, 스위칭 로직을 통해 전역적인 수렴을 보장한다. 이 제어기는 반전 전역 지수 안정성(SGES)을 제공한다. 자세 추적을 위해 필요한 ω_d와 ω̇_d는 부록 B에 명시된 식으로 µ_d로부터 계산된다.
전체 시스템의 안정성은 카스케이드 이론을 이용해 분석한다. 외부 루프는 UGAS(Uniform Global Asymptotic Stability)를, 내부 루프는 SGES를 각각 만족하므로, 두 시스템을 순차적으로 연결했을 때 전체 시스템은 USGAS(Uniform Semi‑Global Asymptotic Stability)를 갖는다. 증명 과정에서는 외부 루프를 마진 안정성 구조와 비마진 안정성 구조로 분해하고, Lyapunov 함수와 입력‑투‑상태 매핑을 통해 안정성을 확보한다.
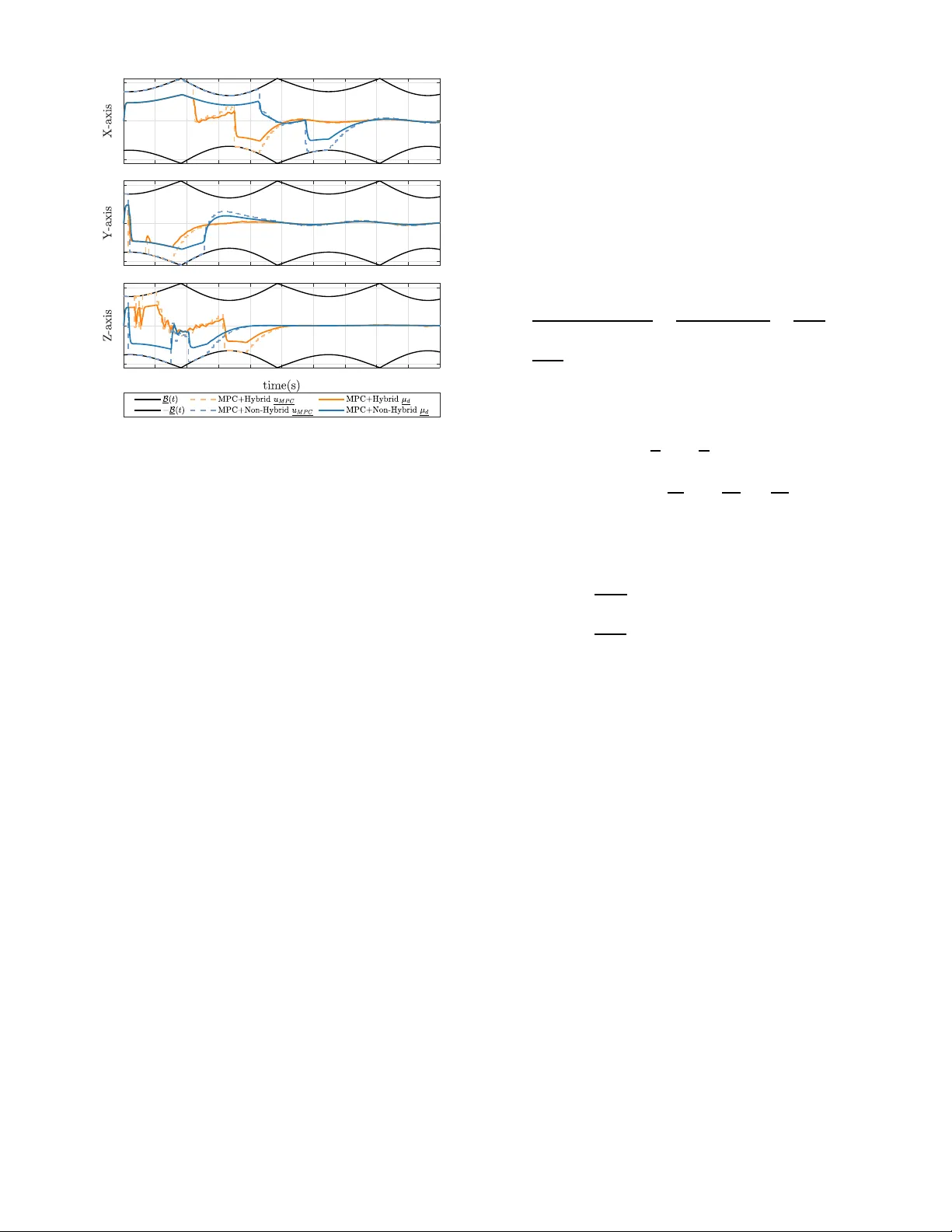
시뮬레이션에서는 복잡한 3‑D 경로와 급격한 요잉 변화를 포함한 시나리오를 설정하고, 제약을 고려한 MPC와 하이브리드 자세 제어기의 성능을 비교한다. 결과는 제안된 방법이 기존
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기