속도 없는 쿼드로터 수평 위치 제어: 비선형 음상상 시스템 이론 적용
본 논문은 속도 측정 없이 위치 피드백만으로 쿼드로터의 수평 위치를 안정적으로 제어하는 방법을 제시한다. 비선형 음상상(NNI) 시스템 이론을 기반으로, 비례 피드백을 통해 수평 위치 서브시스템을 NNI 특성을 갖도록 변형하고, 외부 루프에 엄격히 음상상인 적분 공명 컨트롤러를 설계한다. 제시된 설계는 섹터 경계 조건을 만족하면 로버스트한 비동기 안정성을 보장하며, 시뮬레이션을 통해 성능을 검증한다.
저자: Ahmed G. Ghallab, Ian R. Petersen
본 논문은 쿼드로터 무인항공기의 수평 위치 제어에 있어 속도 정보를 전혀 사용하지 않는 새로운 제어 방식을 제안한다. 기존의 위치‑속도 피드백 혹은 속도 추정기를 이용한 방법들은 센서 노이즈, 계산 지연, 비용 증가 등의 문제점을 안고 있다. 이를 극복하고자 저자들은 비선형 음상상(NNI) 시스템 이론을 기반으로 한 설계 프레임워크를 구축한다.
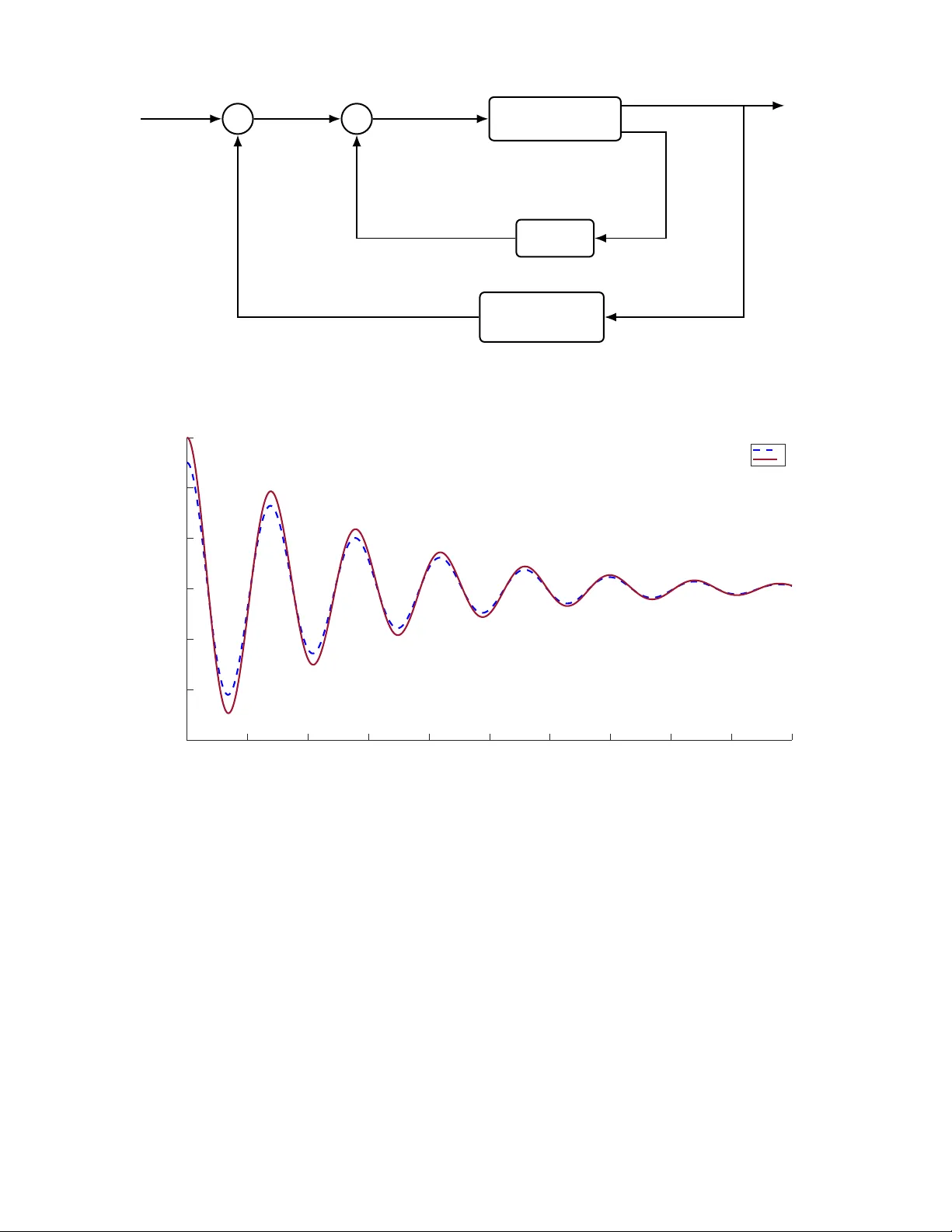
첫 번째 단계는 수평 위치 서브시스템을 정의하고, 비례 피드백 \(U=-K_p\xi_h\) ( \(K_p\) 양의 대각 행렬) 을 적용한다. 이때 시스템 동역학은 \(m\ddot\xi_h+mK_p\xi_h=F_h\) 형태가 되며, 출력은 \(y=\xi_h\) 이다. 저자는 저장 함수 \(V(\xi_h,\dot\xi_h)=\frac12 m\dot\xi_h^T\dot\xi_h+\frac12\xi_h^TK_p\xi_h\) 에 대해 \(\dot V=\dot y^TF_h\) 임을 증명함으로써, 이 서브시스템이 NNI 특성을 만족함을 보인다. 이는 입력 \(F_h\)와 출력 \(y\) 사이에 ‘음상상’ 관계가 존재한다는 의미이며, 비선형 시스템에서도 패시브와 유사한 에너지 보존 특성을 가진다.
두 번째 단계에서는 외부 루프에 엄격히 음상상(SNI)인 적분 공명 컨트롤러를 도입한다. 전송함수는 \(C(s)=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기