다당사자 면역 알고리즘 기반 다목표 최적화
본 논문은 다수의 의사결정자(DM)가 각각 다른 목표를 갖는 다당사자 다목표 최적화 문제(MPMOP)를 해결하기 위해 새로운 면역 기반 진화 알고리즘인 MPIA를 제안한다. MPIA는 각 DM 관점에서의 비지배 정렬 순위를 활용한 ‘당사자 간 가이드 교차’와, 제안된 ‘다당사자 커버 메트릭(MCM)’에 기반한 적응형 활성화 전략을 도입해 탐색 방향과 다양성을 동시에 강화한다. 합성 벤치마크와 실제 UAV 경로 계획 사례에서 기존 MOEA 및 최…
저자: Kesheng Chen, Wenjian Luo, Qi Zhou
1. 서론에서는 다목표 최적화 문제(MOP)가 단일 의사결정자(DM) 하에서 정의되는 전통적 한계를 지적하고, 실제 산업·사회 시스템에서는 여러 부서·기관이 각기 다른 목표를 가지고 협업해야 하는 상황이 빈번함을 강조한다. 이러한 상황을 모델링한 것이 다당사자 다목표 최적화 문제(MPMOP)이며, 목표는 각 DM이 정의한 파레토 전선에 동시에 근접한 해 집합을 찾는 것이다. 기존 MOEA는 다당사자 관점을 반영하지 못해 수렴·다양성 보장이 어렵고, 기존 MPMOEA도 비지배 정렬 기반의 단순 확장에 머물러 검색 방향과 다양성 유지에 한계를 보인다.
2. 배경 및 관련 연구에서는 MPMOP의 수학적 정의를 제시한다. 각 DM k는 목표 집합 Mk를 가지고, 전체 목표 벡터 E(x) = (F1(x),…,FK(x)) 로 표현된다. x ≺k y는 k‑번째 DM의 목표 공간에서의 파레토 우위를 의미한다. 다당사자 파레토 최적해는 모든 DM에 대해 비지배 관계가 성립하지 않는 해 집합이다. 기존 연구는 OptMP‑NDS, OptMP‑NDS2, BPNNIA, BPHEIA, BPAIMA 등으로, 주로 다당사자 비지배 정렬(MP‑NDS)과 기존 MOEA의 교차·변이 연산을 결합한 형태이다. 그러나 이들은 (1) 검색 방향을 명시적으로 조정하지 못하고, (2) 특정 DM에 유리한 해가 다른 DM에 의해 소외되는 다양성 손실 문제가 있다.
3. 제안 방법인 MPIA는 면역 알고리즘 프레임워크 위에 두 가지 핵심 메커니즘을 추가한다.
- **당사자 간 가이드 교차(Inter‑Party Guided Crossover)**: 각 개체에 대해 K개의 비지배 정렬 순위(rk) 를 계산하고, 교차 파트너를 선택할 때 높은 순위(낮은 값)를 가진 개체를 우선적으로 선택한다. 이는 다당사자 관점에서 “가장 유망한” 해를 교차에 활용함을 의미한다. 교차 연산 자체는 SBX(Simulated Binary Crossover) 등 기존 연산자를 사용하지만, 파트너 선택 단계에서 다당사자 정보를 통합한다.
- **다당사자 커버 메트릭(MCM)**: 각 DM k에 대해 현재 인구가 파레토 전선에 얼마나 커버하고 있는지를 측정한다. 구체적으로, 각 DM의 비지배 정렬 결과를 기반으로 커버 비율을 계산하고, 전체 MCM은 K개의 비율 평균으로 정의한다. MCM 값이 낮으면 특정 DM의 다양성이 부족하다는 신호이며, 이때 활성화 집합의 크기를 확대해 더 많은 개체가 교차·변이에 참여하도록 한다. 반대로 MCM이 높으면 활성화 규모를 축소해 연산 효율을 높인다.
알고리즘 흐름은 초기 인구 생성 → 각 DM별 비지배 정렬 → MCM 계산 → 적응형 활성화 집합 선택 → 당사자 간 가이드 교차 → 변이 → 클론 선택 → 반복이다.
4. 실험 설계는 두 부분으로 나뉜다. 첫 번째는 기존 연구에서 제시한 합성 MPMOP 벤치마크(다당사자·다목표 조합)이며, 두 번째는 실제 도시 환경 UAV 경로 계획 문제(BPUAV‑PP)이다. BPUAV‑PP는 효율 DM(비행 거리, 에너지, 고도 변화, 호버 거리)과 안전 DM(사망 위험, 재산 위험, 소음 오염)으로 구성된 7개의 목표를 동시에 최소화한다. 두 지도(MAP‑A, MAP‑B)와 다양한 제약 조건을 포함한다.
성능 평가지표는 IGD(Inverted Generational Distance), HV(Hypervolume)와 제안된 MCM이다. 각 알고리즘을 30번 독립 실행하고 평균·표준편차를 보고, Wilcoxon signed‑rank test으로 통계적 유의성을 검증하였다.
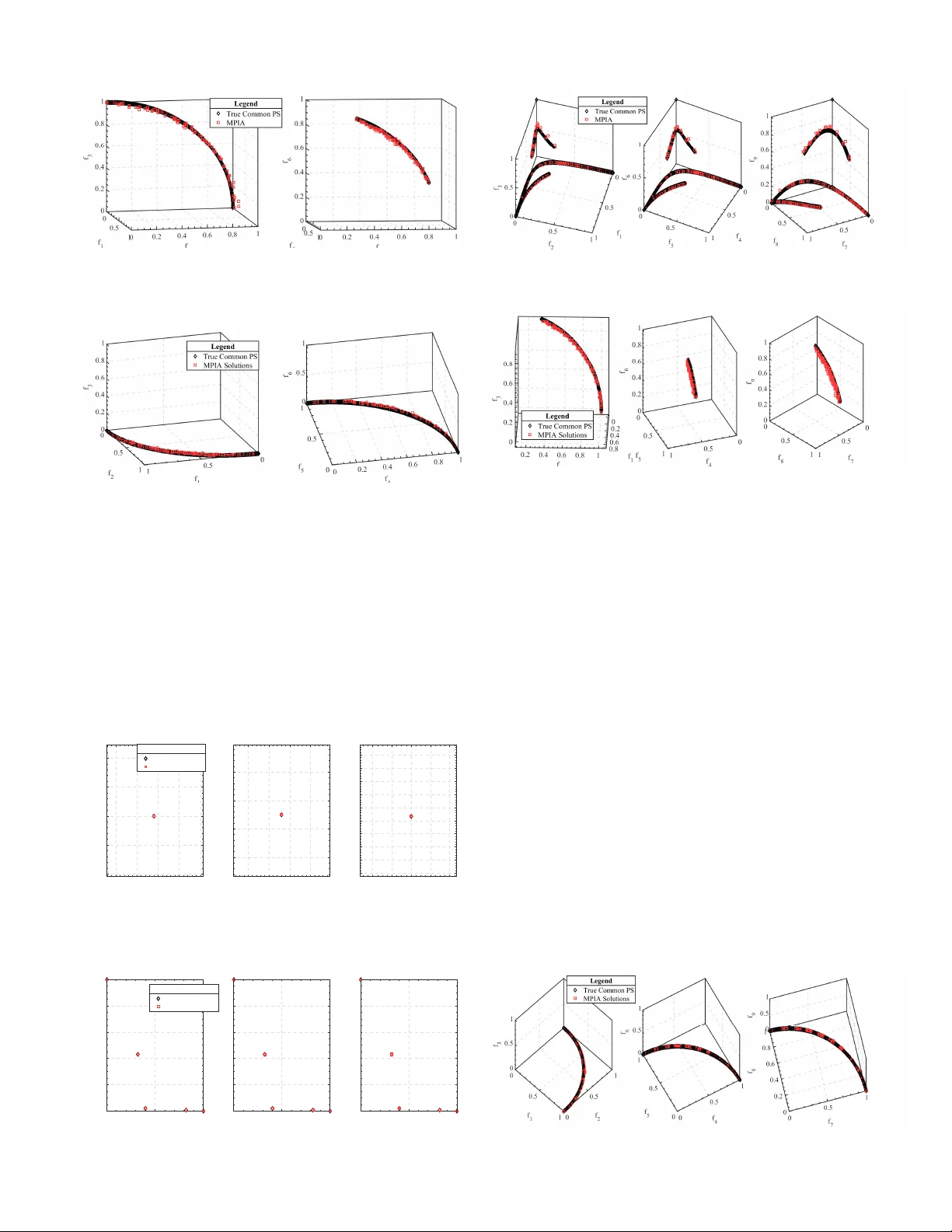
5. 결과 분석에서는 MPIA가 모든 테스트 케이스에서 IGD와 HV 측면에서 기존 MOEA(NSGA‑II, MOEA/D) 및 최신 MPMOEA(OptMP‑NDS, OptMP‑NDS2, BPNNIA, BPHEIA, BPAIMA)보다 우수함을 보여준다. 특히 BPUAV‑PP에서 MPIA는 파레토 전선에 더 가깝게 수렴하면서도 각 DM별 커버 비율이 가장 높아, 다당사자 간 균형 잡힌 해 집합을 제공한다. 당사자 간 가이드 교차가 검색 방향을 효과적으로 조정하고, MCM 기반 적응형 활성화가 다양성 손실을 방지한다는 가설이 실험적으로 확인되었다.
6. 논문의 결론은 MPIA가 다당사자 다목표 최적화에 특화된 메커니즘을 통해 기존 방법보다 전반적인 성능 향상을 달성했으며, 특히 실시간 UAV 경로 계획과 같은 복합적인 실제 문제에 적용 가능함을 강조한다. 향후 연구 방향으로는 MCM 계산 효율화, 파라미터 자동 튜닝, 그리고 다당사자 간 목표 가중치 동적 조정 메커니즘을 제안한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기