고정익 UAV를 활용한 커버리지 구멍 복구를 위한 최적 비행·스케줄링 설계
본 논문은 재난 상황에서 통신이 차단된 지역(커버리지 구멍)에 고정익 무인항공기(UAV)를 중계기로 투입하고, 원형 비행 경로, 사용자 스케줄링, 시간 할당(타임쉐어) 세 요소를 공동 최적화하여 평균 스펙트럼 효율을 극대화하는 알고리즘을 제안한다. 시뮬레이션을 통해 사용자 분포의 표준편차가 클수록 제안 기법이 기존 베이스라인 대비 큰 성능 향상을 보임을 확인하였다.
저자: Daniel T. Bonkowsky, Ibrahim Kilinc, Robert W. Heath
본 논문은 재난 상황에서 통신 인프라가 파괴되거나 접근이 어려운 ‘커버리지 구멍’에 고정익 무인항공기(UAV)를 중계기로 활용하는 방안을 제시한다. 고정익 UAV는 회전익에 비해 비행 지속시간이 길고, 높은 고도에서 넓은 영역을 커버할 수 있다는 장점이 있지만, 최소 비행 속도와 큰 회전 반경 등 물리적 제약으로 최적화가 복잡하다. 이를 해결하기 위해 저자들은 UAV가 일정 고도 H에서 원형 궤도를 비행하면서, 각 시간 슬롯마다 M명의 지상 사용자를 선택해 사용자→UAV(GV) 링크와 UAV→기지국(VB) 링크를 순차적으로 수행하는 슬롯 기반 통신 모델을 설계하였다.
시스템 모델은 3차원 좌표계를 사용해 BS를 원점 근처(0,0,b_z)에, 사용자 군집을 (μ_x, μ_y, 0) 근처에 배치하고, UAV의 원형 궤도 중심을 (c_x, c_y, H)와 반경 r로 정의한다. UAV는 일정 속도 v( v_min < v < v_max )로 비행하며, 각 슬롯 n에서 UAV 위치 x_Vn은 r과 중심 좌표에 따라 결정된다. 슬롯 길이 T_s는 UAV가 정지해도 무방할 정도로 짧게 설정하고, 각 슬롯은 α·T_s만큼 사용자→UAV 전송, (1‑α)·T_s만큼 UAV→BS 전송에 할당한다.
전송 파워는 사용자 P_Gtx와 UAV P_Vtx로 고정하고, 자유공간 전파 모델을 적용해 수신 전력과 SNR을 계산한다. GV 링크는 동시에 M명의 사용자가 전송하므로 잡음 전력이 B·N_0/M으로 나뉘고, VB 링크는 단일 UAV→BS 전송이므로 잡음 전력은 B·N_0이다. 각각의 SNR을 로그2(1+SNR) 형태로 스펙트럼 효율(SE)로 변환한다.
전체 시스템 성능은 각 슬롯 n에서 α·SE_GV_n와 (1‑α)·SE_VB_n 중 작은 값을 선택하고, 이를 N개의 슬롯에 대해 평균낸 값으로 정의한다. 최적화 목표는 이 평균 SE를 최대화하는 것이며, 최적화 변수는 시간 할당 비율 α, 사용자 스케줄링 행렬 B(이진 변수), 원형 궤도의 중심 좌표와 반경(r, c_x, c_y)이다. 문제는 비선형·비볼록이며, 특히 최소 연산이 비미분 가능해 직접 최적화가 어려운 구조다.
이를 해결하기 위해 저자들은 문제를 세 개의 서브문제로 분할한다. 첫 번째는 주어진 궤도와 스케줄링에 대해 α와 슬롯별 하한 η_n을 선형 프로그램(LP) 형태로 최적화하는 타임쉐어 최적화이다. 두 번째는 주어진 α와 궤도에 대해 사용자 스케줄링을 연속형 변수(0≤˜1(g,n)≤1)로 완화하고, 각 슬롯당 최대 M명, 전체 슬롯당 각 사용자는 최대 N·M/G번 스케줄링되는 제약을 두어 LP로 해결한다. 최적화 후에는 각 슬롯에서 가장 큰 M개의 값을 1로, 나머지는 0으로 복원한다.
세 번째는 원형 궤도 최적화이다. SE 함수는 거리 d에 대해 로그 형태이며 볼록함수이지만, 거리 자체가 r과 중심 좌표에 대한 비볼록 함수이므로 직접 최적화가 불가능하다. 저자들은 거리 변수 d_g,n=||x_Vn−x_Gg||와 d_B,n=||x_Vn||를 보조 변수로 도입하고, SE를 d에 대한 로그 함수로 재표현한다. 이후 첫 번째 테일러 전개를 이용해 선형(볼록) 근사 서브함수를 만들고, SCA(성공적 볼록 근사) 절차를 통해 반복적으로 최적화한다. 거리 제약은 부등식 형태( d_g,n ≥ 실제 거리², d_B,n ≥ 실제 거리² )로 완화했으며, 최적화 과정에서 이 제약은 최적점에서 등호가 성립한다. 각 SCA 반복은 선형 목적함수와 선형·볼록 제약으로 구성된 볼록 최적화 문제이며, MOSEK 같은 상용 솔버로 효율적으로 해결된다.
알고리즘은 타임쉐어 → 스케줄링 → 궤도 순으로 한 번씩 업데이트하고, 수렴할 때까지 반복한다. 수렴성은 SCA의 이론적 보장과 η_n이 거리 감소에 따라 증가하는 특성으로 확보된다.
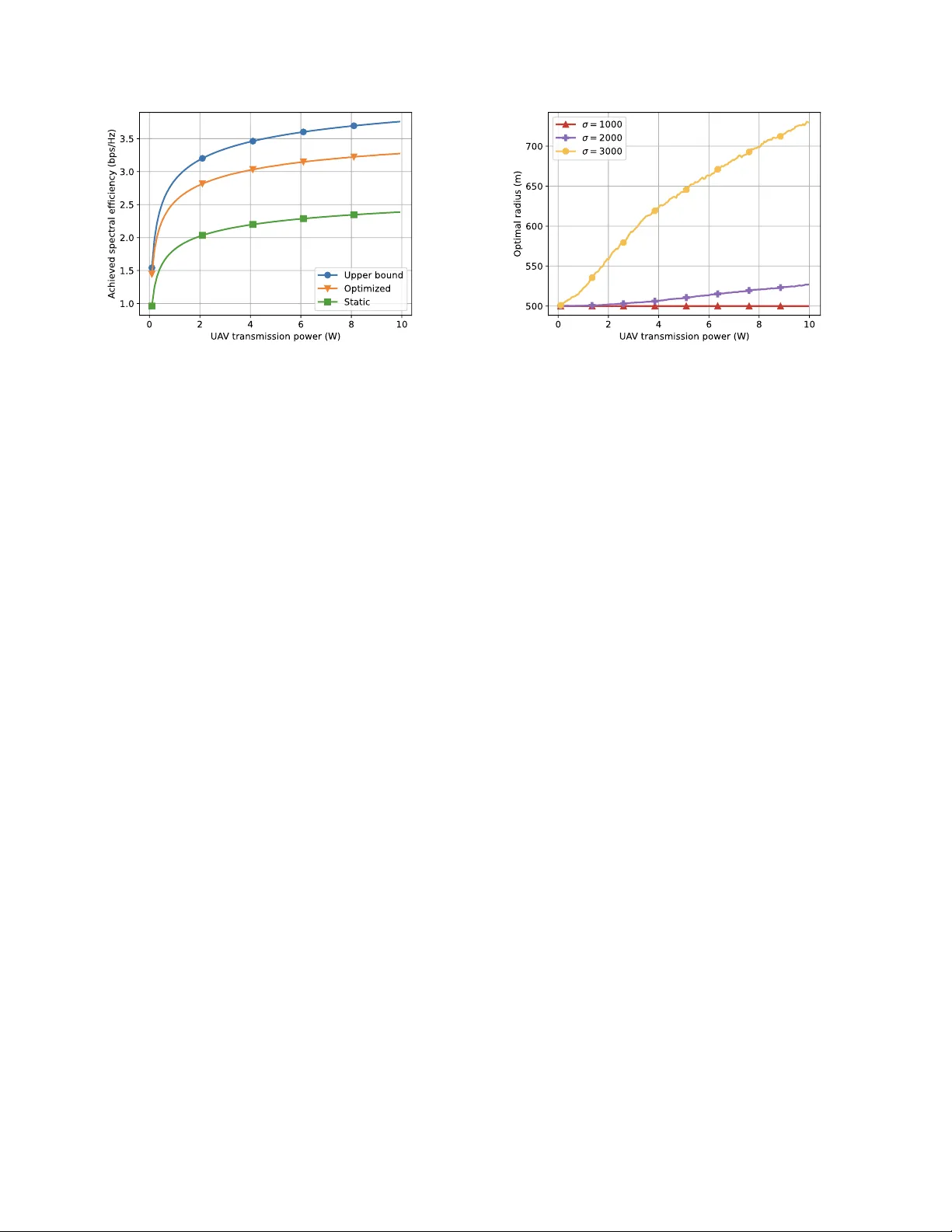
시뮬레이션에서는 사용자 위치를 평균(μ_x, μ_y) 주변에 표준편차 σ를 갖는 정규분포로 생성하고, σ를 변화시켜 사용자 분포의 확산 정도를 테스트했다. UAV 전송 전력, 비행 고도, 슬롯 수 N 등을 파라미터로 변형하면서 평균 SE를 측정했다. 결과는 σ가 커질수록(즉, 사용자가 넓게 퍼질수록) 제안 최적화가 베이스라인(고정 궤도·고정 스케줄링) 대비 평균 SE 향상이 크게 나타났으며, 특히 σ가 큰 경우 30% 이상 성능 개선을 보였다. 또한 UAV 전송 전력과 비행 고도가 증가할수록 전반적인 SE가 상승했지만, 최적화된 α와 궤도 파라미터가 이러한 물리적 이득을 효율적으로 활용한다는 점을 확인했다.
결론적으로, 이 논문은 임의의 사용자 배치를 허용하는 현실적인 고정익 UAV 중계 시스템 모델을 제시하고, 비행 궤도·시간 할당·사용자 스케줄링을 통합적으로 최적화하는 효율적인 알고리즘을 개발했다. 제안 방법은 사용자 분포가 불규칙하고 표준편차가 큰 재난 상황에서도 강인한 성능을 제공한다는 장점을 갖는다. 향후 연구에서는 다중 UAV 협업, 양방향 트래픽, 비라인오브사이트 채널, 동적 사용자 이동 등을 고려한 확장 모델이 필요할 것으로 보인다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기