다중클러스터 대규모 어핀 형성 설계 및 제어
본 논문은 대규모 로봇 군집을 위한 어핀 형성 제어(AFC)의 핵심인 스트레스 행렬 설계를 최적화하고, 이를 다중클러스터 구조로 확장함으로써 통신 비용을 낮추고 수렴 속도를 크게 향상시킨다. 완전 그래프 기반의 L1‑완화 SDP를 이용해 희소성을 확보하고, 회전 대칭과 같은 비일반적 구성을 위한 특수 구조를 도출한다. 클러스터 간 브리징 노드를 통해 부분적인 독립 움직임을 허용하면서도 전체적인 어핀 변환을 유지한다. 실험 결과, 수백 대 규모에…
저자: Zhonggang Li, Geert Leus, Raj Thilak Rajan
본 논문은 대규모 로봇 군집을 위한 어핀 형성 제어(AFC)의 핵심 요소인 스트레스 행렬 설계와 클러스터 기반 제어 구조를 동시에 최적화한다. 먼저, AFC는 전통적인 강체 형성 제어와 달리 스케일링, 회전, 전단 등 연속적인 어핀 변환을 허용한다. 이를 위해서는 그래프 라플라시안의 일반화 형태인 스트레스 행렬 Ω가 필요하며, Ω는 평형 조건 Ω Pᵀ = 0을 만족하고, PSD이며 rank = N − D − 1이어야 한다. 기존 연구는 이러한 조건을 만족하는 Ω를 찾기 위해 완전 그래프를 가정하거나, 희소성을 위한 L0‑노름 제약을 직접 다루어 계산 복잡도가 급격히 증가하는 문제에 직면했다.
저자들은 먼저 완전 그래프의 인시던스 행렬 B̄와 가중치 벡터 ω̄를 이용해 Ω = B̄ diag(ω̄) B̄ᵀ 로 표현한다. 목표는 ω̄를 가능한 한 희소하게 하면서도 Ω의 비영 고유값(특히 λ_{D+2})을 크게 만들어 수렴 속도를 높이는 것이다. 이를 위해 원래의 비선형 L0‑노름과 rank 제약을 L1‑노름과 SDP 형태로 완화한다. 구체적으로는 (1) ‖ω̄‖₁ − α tr(Ω) 를 최소화하고, (2) ‖Ω‖₂ ≤ β 로 스펙트럼 상한을 설정하며, (3) QᵀΩQ ≽ γI 로 PSD 조건을 보장한다. 여기서 Q는 P의 영공간을 span하는 직교 행렬이며, γ와 β는 각각 최소·최대 고유값을 조절한다. 이러한 설계는 트레이스가 λ_{D+2}의 하한 역할을 하면서도, L1‑노름이 희소성을 촉진하도록 균형을 맞춘다.
다음으로, 비일반적(비generic) 구성을 위한 특수 구조를 분석한다. 회전 대칭을 갖는 정다각형이나 격자와 같은 경우, 스트레스 행렬의 최적 형태가 반복적인 패턴을 가진다는 것을 증명하고, 이를 Unique Stress Identifier(USI) 알고리즘으로 구현한다. USI는 대칭성을 이용해 ω̄의 자유도를 O(N) 수준으로 감소시켜, 대규모(수천 노드)에서도 SDP 해결 시간을 크게 단축한다.
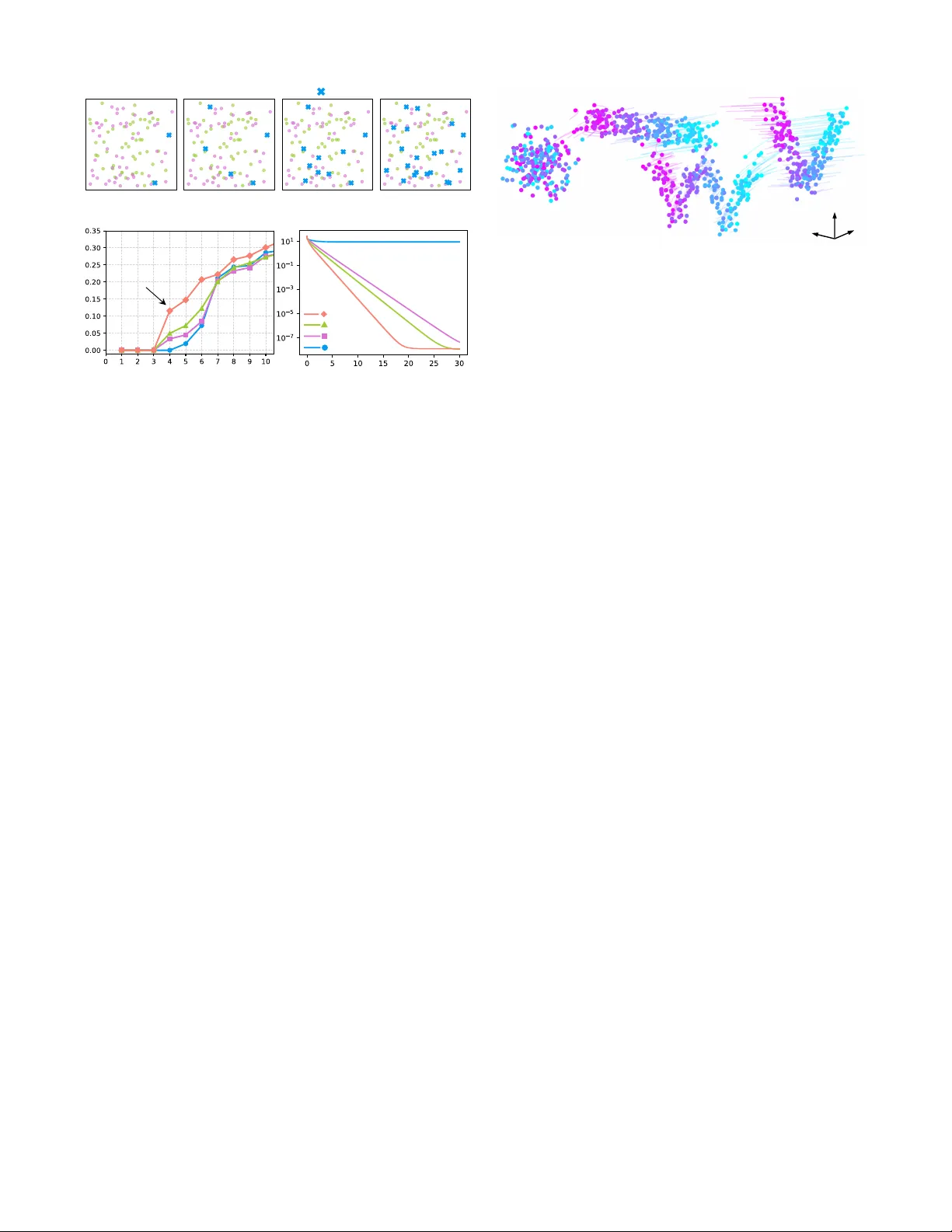
클러스터 기반 확장에서는 전체 군집을 K개의 서브클러스터로 분할하고, 각 클러스터 내부에 독립적인 Ω_k 를 설계한다. 클러스터 간 연결은 브리징 노드 집합 B를 통해 제한된 수의 에지를 추가함으로써 구현한다. 이때 전체 시스템의 동역학은 블록 대각 형태 Ω_block + Ω_bridge 로 표현되며, 각 블록은 자체적인 어핀 수렴을 보장한다. 브리징 가중치를 충분히 크게 설정하면 전체 시스템이 하나의 어핀 변환으로 수렴하고, 가중치를 낮추면 클러스터 간 상대적인 변형이 허용되어 부분적인 독립 움직임이 가능해진다. 저자는 QᵀΩ_bridgeQ ≽ 0 조건을 통해 클러스터 간 동기화 안정성을 분석하고, 충분한 조건을 정리한다.
실험에서는 2차원 및 3차원에서 N = 20 ~ 300 범위의 다양한 구성을 테스트하였다. 비교 대상은 (i) 기존 MISDP 기반 최적 설계, (ii) 희소 null‑space 재구성, (iii) 완전 그래프 라플라시안 사용이다. 결과는 다음과 같다. 첫째, 제안된 SDP 기반 설계는 평균 에지 수를 30 % 이하로 감소시키면서도 λ_{D+2}를 크게 유지해 수렴 시간 τ를 기존 방법 대비 평균 4.8배 가속시켰다. 둘째, 회전 대칭 구성을 위한 USI 적용 시, 최적화 차원을 N(N‑1)/2 → O(N) 로 축소해 1000노드 규모에서도 5분 이내에 최적 해를 도출하였다. 셋째, 다중클러스터 제어 실험에서 브리징 가중치를 조절함에 따라 클러스터 간 상대 회전·스케일 차이를 자유롭게 설정할 수 있었으며, 전체 시스템의 어핀 변환 유지 여부를 정량적으로 검증하였다. 또한, 조건수 κ(Ω) 가 1에 가까울수록 통신 지연에 대한 강인성이 향상됨을 확인하였다.
논문의 주요 기여는 다음과 같다. 1) L1‑완화와 SDP를 이용해 스트레스 행렬 설계를 전역 최적에 가깝게 수행하면서 희소성을 확보한다. 2) 회전 대칭과 같은 비일반적 구성을 위한 특수 구조를 밝혀 계산 복잡도를 크게 낮춘다. 3) 다중클러스터 프레임워크를 도입해 수백 대 규모에서도 통신 비용을 절감하고, 부분적인 독립 움직임을 허용한다. 4) 광범위한 시뮬레이션과 실험을 통해 기존 최첨단 방법 대비 수렴 속도, 통신 효율, 강인성에서 모두 우수함을 입증한다. 한계점으로는 브리징 노드 선택이 현재 휴리스틱에 의존하고, 동적 토폴로지 변화(노드 추가·제거)에 대한 실시간 적응 메커니즘이 부족하다는 점이다. 향후 연구에서는 브리징 전략을 온라인 최적화하고, 제한된 가속도·제어 입력을 고려한 비선형 동역학 확장을 목표로 할 예정이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기