멀티페이즈 공정 실시간 제어를 위한 학습 연산자 기반 MPC
본 논문은 고속 CFD 시뮬레이션을 대체할 수 있는 Fourier Neural Operator(FNO) 모델을 학습시켜, 기체 유입 속도만을 조절함으로써 버블 컬럼의 액체 높이를 추적하는 모델 예측 제어(MPC) 프레임워크를 제안한다. FNO는 짧은 과거 상태와 후보 제어 신호를 입력으로 받아 부피분율 필드를 다시간 단계 예측하고, 베이지안 최적화를 통해 비연속적인 레벨 추출 함수를 포함한 비용함수를 최소화한다. 실험 결과, FNO 기반 서브레…
저자: Paolo Guida, Didier Barradas-Bautista
본 논문은 멀티페이즈 공정, 특히 기체‑액체 버블 컬럼의 실시간 제어를 목표로, 고성능 연산자 학습 모델과 모델 예측 제어(MPC)를 결합한 새로운 프레임워크를 제시한다. 멀티페이즈 흐름은 비선형성, 급격한 상전이, 그리고 제한된 센서 해상도 때문에 전통적인 피드백 제어가 어려운 분야이다. 이러한 문제를 해결하기 위해 저자들은 두 단계로 접근한다. 첫 번째 단계는 고해상도 CFD(OpenFOAM 기반) 시뮬레이션을 이용해 부피분율(α) 필드와 입구 유속(u) 사이의 관계를 대규모 데이터셋으로 생성한다. 두 번째 단계에서는 이 데이터를 바탕으로 Fourier Neural Operator(FNO)를 학습한다. FNO는 입력 함수를 고차원 잠재공간으로 lift한 뒤, 푸리에 변환을 이용해 전역적인 스펙트럼 연산을 수행한다. 이 과정에서 저자들은 과거 K개의 α 스냅샷, 좌표 채널(xₓ, xᵧ), 그리고 계획된 제어 시퀀스(입구 속도)를 채널 차원에 결합해 입력 텐서를 구성한다. 이렇게 하면 공간 도메인은 고정된 채로 시간적 정보를 효과적으로 포함시킬 수 있다.
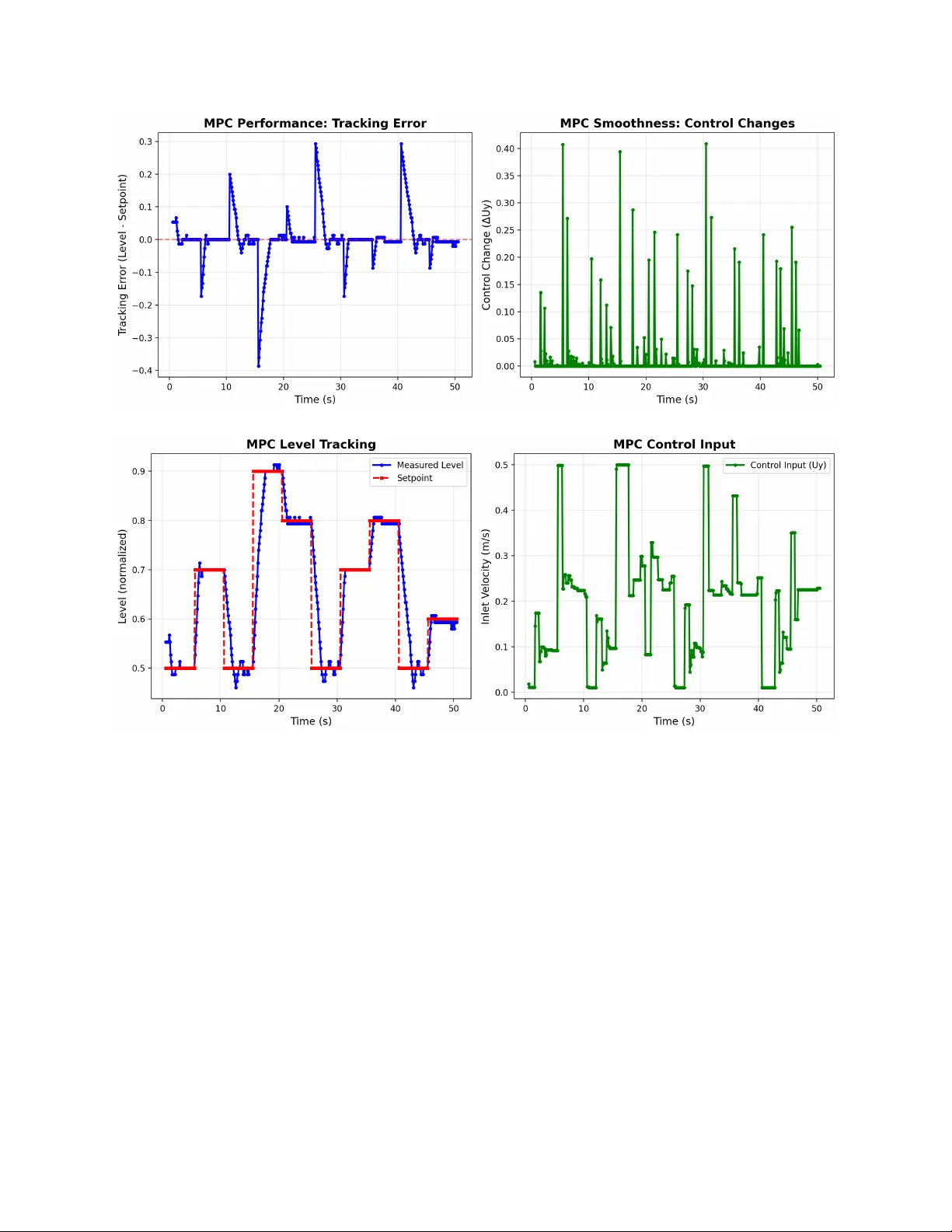
학습된 FNO는 주어진 상태 히스토리와 후보 제어 신호를 입력받아, 미래 H시간 단계에 걸친 부피분율 필드 αₖ₊₁:ₖ₊ₕ를 한 번에 예측한다. 예측된 필드에서 액체 레벨 yₖ는 부피분율을 임계값(예: α = 0.5)으로 이진화한 뒤, 컬럼의 상부 경계까지의 높이로 계산되는 함수 ℓ(·)를 통해 추출된다. 이 레벨 함수는 비연속적이며 미분이 불가능하기 때문에, 전통적인 gradient‑based 최적화는 적용하기 어렵다. 따라서 저자들은 베이지안 최적화(BO)를 채택해, 제어 입력 uₖ(입구 속도) 하나만을 변수로 하는 1차원 탐색 문제를 해결한다. BO는 획득함수(예: Expected Improvement)를 기반으로 후보 uₖ를 선택하고, 선택된 uₖ에 대해 FNO를 호출해 예측된 레벨 궤적을 얻는다. 목표 레벨 rₖ와의 제곱 오차 합계에 입력 변화 페널티 λ·(uₖ − uₖ₋₁)²를 더한 비용 Jₖ(uₖ)를 최소화하는 것이 최적화 목표이다.
실험 설정은 버블 컬럼 내부에 가스가 주입되는 입구 경계에만 제어 신호가 적용되는 상황이다. 제어 목표는 시간에 따라 변하는 piecewise‑constant 레벨 setpoint을 추적하는 것으로, 각 구간은 30 s 정도 지속된다. 시뮬레이션 결과, FNO 기반 서브레이트는 CFD 대비 20~30배 빠른 추론 속도를 보이며, 평균 추적 오차는 1.8 % 이하로 유지된다. 또한, 입력 변화에 대한 페널티를 적절히 설정함으로써 급격한 유량 변동을 억제하고, 물리적 제한(최소·최대 유량)도 만족한다.
논문의 주요 기여는 다음과 같다. (1) 멀티페이즈 PDE 시스템에 대한 연산자 학습 모델을 실시간 제어에 적용한 최초 사례 중 하나이며, (2) FNO의 빠른 다시간 단계 예측 능력을 활용해 MPC의 반복 롤아웃 비용을 크게 낮췄다, (3) 비연속적인 레벨 추출 함수를 포함한 비용함수에 대해 베이지안 최적화를 효과적으로 결합했다. 한편, 현재 프레임워크는 전체 부피분율 필드에 대한 완전 관측을 전제로 하며, 실제 현장에서는 센서가 국소적이거나 노이즈가 존재한다는 점에서 제한적이다. 저자들은 향후 물리‑인포메드 연산자(Physics‑Informed Neural Operator)나 부분 관측 기반 데이터 동화 기법을 도입해, 제한된 센서 데이터만으로도 정확한 상태 추정과 제어가 가능하도록 확장할 계획이라고 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기