동시 배치 PLL 기반 그리드‑추종 재생에너지와 동기콘덴서 시스템의 우세 순간 안정성
본 논문은 그리드‑추종(GFL) 재생에너지 변환기와 인접에 설치된 동기콘덴서(SynCon) 간의 상호작용을 분석한다. 빠른 PLL 동역학과 느린 SynCon 로터 동역학을 이중 시간척도로 분리한 모델을 제시하고, SynCon이 도입되면 PLL의 안정성 경계가 크게 확대되지만 지배적인 불안정 원인이 PLL에서 SynCon의 로터 가속으로 전이됨을 밝혀낸다. 또한, PLL에 적절히 설계된 감쇠 루프를 추가하면 이 감쇠 효과가 느린 시간척도로 전달되…
저자: Bingfang Li, Songhao Yang, Qinglan Wang
본 논문은 재생에너지 발전소에서 그리드‑추종(GFL) 전력변환기와 인접에 설치되는 동기콘덴서(SynCon)의 동시 배치가 전력계통의 순간 안정성(transient stability)에 미치는 영향을 체계적으로 분석한다. 서론에서는 GFL 변환기의 고전적인 한계—전압·주파수 교란 시 동기화 손실과 제한된 전력지원 능력—를 서술하고, 이를 보완하기 위한 두 가지 접근법을 소개한다. 첫 번째는 가상동기발전기(VSG) 기반의 그리드‑형성(GFM) 제어이며, 두 번째는 GFL 변환기와 SynCon을 병렬 연결하는 ‘GFLR+SynCon’ 구성을 제시한다. 특히 후자는 전통적인 전력계통에서 관성·감쇠를 제공하는 SynCon의 전압원 특성이 GFL 변환기의 취약점을 보완한다는 점에서 실무 적용 가능성이 높다.
하지만 기존 연구는 SynCon 자체의 순간 불안정성(특히 고장 후 가속 불안정)만을 집중적으로 다루었으며, GFL 변환기의 PLL이 시스템 전체의 지배적인 불안정 원인이 될 수 있다는 점은 충분히 검토되지 않았다. 따라서 논문은 두 가지 핵심 질문을 제기한다. (1) SynCon이 도입된 후 지배적인 순간 불안정 원인은 PLL인가, SynCon인가? (2) SynCon의 불안정을 효과적으로 억제할 수 있는 실용적인 방법은 무엇인가?
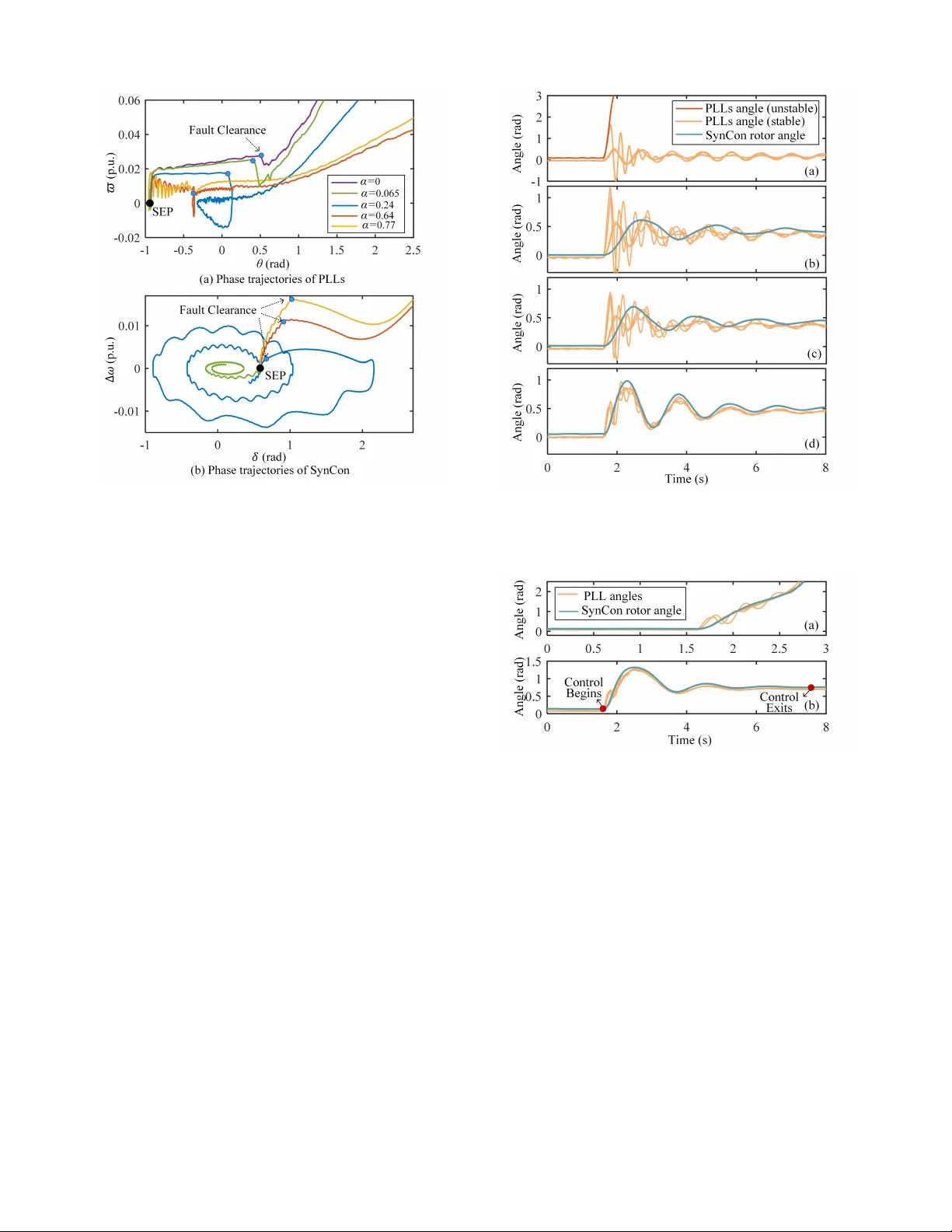
이를 해결하기 위해 저자들은 이중 시간척도 모델을 개발한다. 시스템을 빠른 서브시스템(PLL 동역학)과 느린 서브시스템(SynCon 로터 동역학)으로 분리하고, 특이 섭동 이론을 적용해 각각의 안정성을 독립적으로 분석한다. 빠른 서브시스템에서는 PLL의 상태 방정식 dθ_i/dt = ϖ_i, dϖ_i/dt = k_Ii·u_qi + k_Pi·du_qi/dt 를 기반으로, SynCon 전압원 E_s∠δ와 네트워크 결합계수 α가 u_qi에 미치는 영향을 상세히 도출한다. 이를 통해 PLL의 등가 전력(P_Ei, P_Mi)과 감쇠(D_i, D_ij) 파라미터가 SynCon의 전압·전류 상호작용에 의해 어떻게 변형되는지 수식화한다.
느린 서브시스템에서는 SynCon의 로터 각도 δ와 각속도 Δω에 대한 방정식 dδ/dt = Δω, T_s·dΔω/dt = P_c – P_es – D_s·Δω 를 사용한다. 여기서 P_c는 GFL 변환기들의 전류와 전압에 의해 발생하는 결합 전력이며, SynCon이 전압원으로서 제공하는 전압 E_s와 네트워크 파라미터 α가 P_c에 직접적인 영향을 미친다. 중요한 점은, SynCon이 없을 때는 PLL이 시스템의 지배적인 불안정 원인이지만, SynCon이 도입되면 PLL의 안정성 경계가 크게 확대되고, 비동조 결합 효과가 감소한다는 것이다. 그러나 동시에, SynCon 로터의 동역학이 새로운 지배적인 불안정 원인으로 부상한다. 즉, GFL 변환기들의 출력 전력 변동이 SynCon에 전달되어 로터 각도가 급격히 가속하고, 이는 관성계통에서 흔히 볼 수 있는 가속 불안정(acceleration instability)과 동일한 메커니즘이다.
이러한 현상을 해결하기 위해 논문은 PLL에 추가적인 감쇠 루프 K_d·(θ_i‑δ) 를 도입한다. 이 피드백은 PLL의 감쇠 효과를 느린 시간척도로 전이시켜, SynCon 로터 방정식에 유사한 감쇠 항을 생성한다. 수식적으로는 D_s·Δω 항에 K_d·Δθ 형태의 추가 감쇠가 포함되어, 로터 가속을 효과적으로 억제한다. 이 방법은 기존 SynCon의 전통적인 감쇠 제어(예: 전기적 댐핑, 전압 조정)보다 구현이 간단하고, GFL 변환기의 DC‑link 전압·전력 균형을 유지하면서도 전체 시스템의 순간 안정성을 크게 향상시킨다.
제안된 제어 전략의 실효성은 Converter‑Controller‑Based Hardware‑in‑the‑Loop(CHIL) 실험을 통해 검증되었다. 실험에서는 3개의 GFL 변환기와 1개의 SynCon을 구성하고, 다양한 고장 시나리오(단상 단락, 저전압 유지(LVRT) 등)를 적용하였다. 결과는 K_d를 0.2~0.4(p.u.) 수준으로 설정했을 때, SynCon 로터 각도 진동이 70% 이상 감소하고, PLL 동기화 실패 없이 전압·주파수가 빠르게 복구됨을 보여준다. 또한, 비동조 결합에 의한 다중 GFL 간의 상호작용이 현저히 감소하여, 시스템 전체의 안정 마진이 크게 확대되었다.
결론적으로, 논문은 다음과 같은 세 가지 주요 공헌을 제시한다. (1) 이중 시간척도 모델을 통한 GFL‑SynCon 시스템의 구조적 이해와 분석 프레임워크 제공, (2) SynCon 도입 시 지배적인 순간 불안정 원인이 PLL에서 SynCon 로터 가속으로 전이되는 메커니즘 규명, (3) PLL 감쇠 루프를 활용한 SynCon 로터 가속 억제라는 실용적이고 간단한 제어 방안 제시. 이러한 결과는 향후 대규모 재생에너지 발전소에서 GFL 변환기와 SynCon을 병렬 배치할 때, 설계자들이 안정성을 확보하기 위한 구체적인 지침을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기