안전한 흐름: 물리‑가이드 실시간 텍스트 기반 휴머노이드 전신 제어
SafeFlow는 텍스트 명령을 실시간으로 받아 물리적 타당성을 보장하는 전신 동작을 생성하고, 3단계 안전 게이트를 통해 OOD 입력과 물리적 위반을 사전에 차단하여 휴머노이드 로봇의 안전하고 안정적인 실행을 가능하게 한다.
저자: Hanbyel Cho, Sang-Hun Kim, Jeonguk Kang
본 논문은 텍스트 기반 실시간 휴머노이드 제어에서 발생하는 물리적 비현실성(physical hallucination) 문제를 해결하기 위해 SafeFlow라는 프레임워크를 제안한다. 기존의 키네마틱 전용 생성기는 관절 한계 초과, 자기 충돌, 균형 붕괴 등 물리적 위반을 자주 일으키며, 특히 훈련 분포를 벗어난(OOD) 명령에 취약했다. SafeFlow는 이러한 문제를 두 차원에서 접근한다.
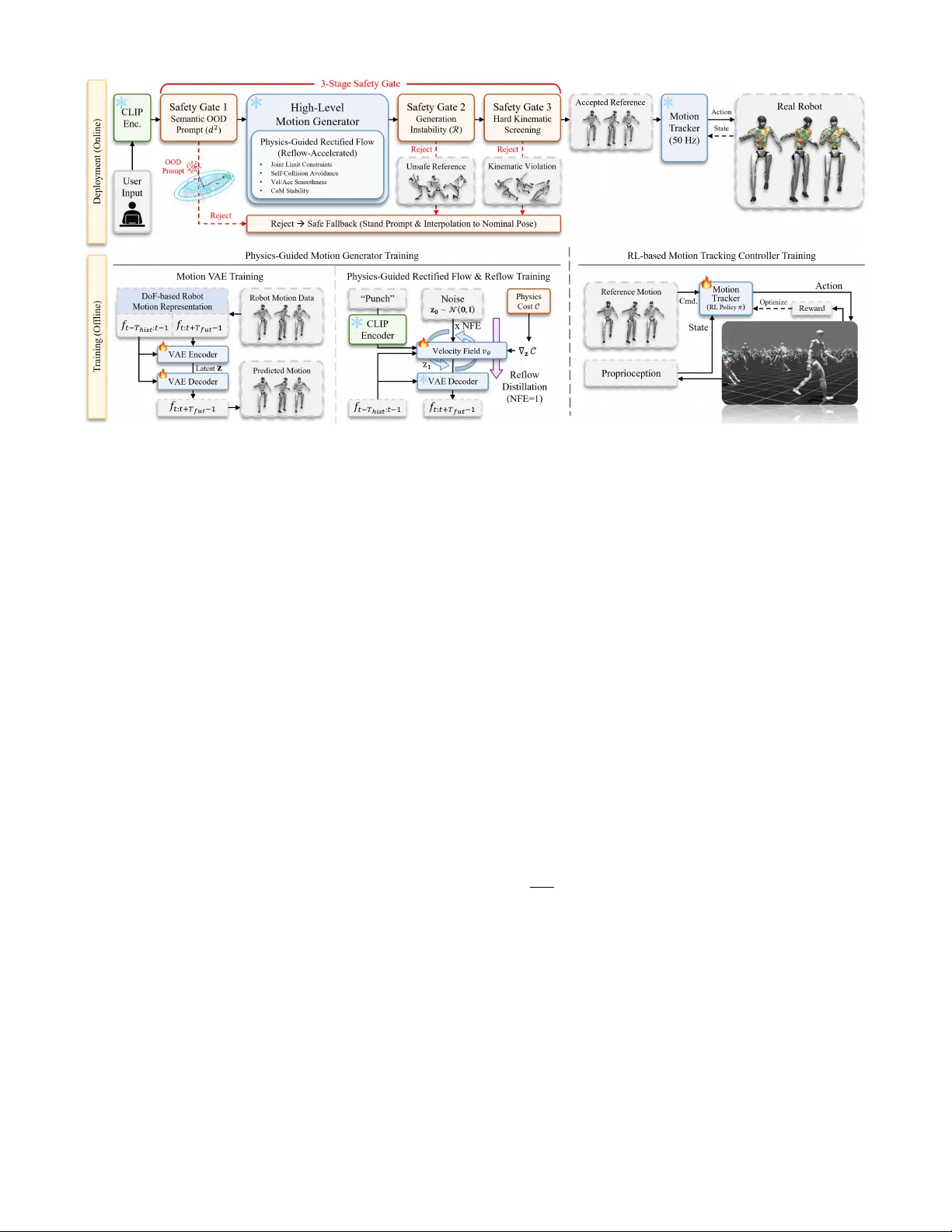
첫 번째 차원은 고수준 모션 생성 단계이다. 대규모 모션 데이터셋으로 VAE를 학습해 잠재공간을 구축하고, 텍스트 명령을 CLIP 텍스트 인코더로 임베딩한다. 이후 정규화 흐름 매칭(Rectified Flow Matching) 방식을 사용해 조건부 속도장 vθ를 학습한다. 이때 물리 비용 C를 정의해 관절 한계, 자기 충돌, 매끄러움, 무게중심 안정성 네 가지 제약을 포함한다. ODE 통합 중에 ∇ₙC를 이용해 물리‑가이드된 속도 ˜vθ를 계산함으로써 생성 과정 자체가 물리적 실행 가능 영역으로 유도된다. 그러나 물리‑가이드 샘플링은 반복적인 그래디언트 연산으로 지연이 발생한다. 이를 해결하기 위해 Reflow 기법을 적용, 가이드된 궤적을 직선화해 네트워크 가중치에 물리 제약을 내재화한다. 결과적으로 NFE=1, 즉 한 번의 함수 평가만으로도 물리적으로 타당한 모션을 실시간으로 생성할 수 있다.
두 번째 차원은 배포 시 안전 보장이다. SafeFlow는 3‑Stage Safety Gate을 도입한다. 1단계는 텍스트 임베딩 공간에서 Mahalanobis 거리를 이용해 의미적 OOD를 탐지한다. 이는 훈련 데이터 분포의 평균·공분산을 사전 계산해, 새로운 명령이 통계적으로 멀리 떨어져 있으면 차단한다. 2단계는 생성된 잠재 흐름의 방향 민감도(discrepancy) 지표를 사용해 급격한 변동이나 불안정성을 검출한다. 이 지표는 흐름의 미분값을 비교해 일정 임계값을 초과하면 거부한다. 3단계는 최종 하드 제약 검증으로, 관절·속도 한계, 자기 충돌, 지면 침투 등을 직접 체크한다. 모든 단계가 통과하면 하위 레벨 RL 기반 모션 트래킹 컨트롤러가 로봇에 명령을 전달한다; 거부될 경우 사전 정의된 안전 폴백 동작을 실행한다.
실험은 실제 Unitree G1 휴머노이드를 사용해 진행되었다. 비교 대상은 TextOp 등 기존 Diffusion 기반 텍스트‑모션 생성기이다. 평가 항목은 성공률(실제 로봇이 목표 동작을 완수한 비율), 물리적 준수도(관절 한계 위반·자기 충돌·균형 붕괴 횟수), 그리고 추론 속도(NFE 및 실시간 지연)이다. SafeFlow는 모든 지표에서 현저히 높은 성능을 보였으며, 특히 OOD 프롬프트에 대해 90% 이상을 안전하게 차단해 로봇 손상을 방지했다. 또한 Reflow를 통한 NFE=1 구현으로 30ms 이하의 지연을 달성, 실시간 스트리밍 제어에 충분한 속도를 제공했다.
결론적으로 SafeFlow는 물리‑가이드 생성과 다단계 안전 게이트를 결합해 텍스트 기반 휴머노이드 제어의 핵심 문제를 해결한다. 물리적 실행 가능성을 학습 단계에서부터 내재화하고, 배포 시 위험을 사전 차단함으로써 연구실 수준의 시뮬레이션 결과를 실제 로봇에 안전하게 적용할 수 있는 길을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기