MonoSIM: 저비용 단일 카메라 기반 Ackermann 차량 SIL 프레임워크
MonoSIM은 ROS2와 Box2D 기반 MVSIM을 활용한 오픈소스 소프트웨어‑인‑더‑루프(SIL) 시뮬레이터이다. 640×480 해상도의 단일(모노) 카메라 영상을 전처리·투시 변환 후 슬라이딩 윈도우와 2~3차 다항식 피팅을 이용해 차선 검출을 수행한다. 차량 동역학은 Ackermann 조향을 따르는 3자유도(전·후·요) 바이시클 모델과 선형화된 Pacejka 타이어 모델을 사용하며, 이를 상태‑공간 형태로 변환해 MPC와 PID 제어기…
저자: Shantanu Rahman, Nayeb Hasin, Mainul Islam
본 논문은 저비용 연구·교육용으로 설계된 오픈소스 SIL 플랫폼인 MonoSIM을 소개한다. 시스템은 ROS2와 Box2D 기반의 경량 시뮬레이터 MVSIM 위에 구축되었으며, Ackermann 조향을 따르는 소형 차량 모델을 지원한다. 주요 특징은 단일 모노 카메라를 이용한 실시간 차선 검출 파이프라인과, 이를 기반으로 한 두 종류의 제어기(PID, MPC)의 구현·비교이다.
먼저 센서 모듈에서는 Logitech C310 HD 카메라로부터 640×480 해상도 영상을 획득하고, 체스보드 캘리브레이션을 통해 내부·외부 파라미터를 추정한다. DLT 기반 호모그래피 변환으로 원근 보정을 수행해 상단‑시점(bird’s‑eye view) 영상을 만든 뒤, HSV 색공간의 V 채널을 이용해 차선 특징을 강조한다. 슬라이딩 윈도우 기법을 적용해 차선 픽셀을 추출하고, 좌·우 차선 각각에 2~3차 다항식을 피팅해 연속적인 차선 곡선을 얻는다. 이 과정은 연산량이 적어 실시간 처리에 적합하고, 저해상도·저사양 환경에서도 안정적으로 동작한다.
차량 동역학은 Ackermann 조향을 근사화한 바이시클 모델을 기반으로, 전·후·요 3자유도 방정식을 전개한다. Pacejka 타이어 모델을 선형화해 전·후 코너링 강성(C_f, C_r)과 슬립각(α_f, α_r) 사이의 관계를 정의하고, 이를 상태‑공간 형태(A, B, C 행렬)로 변환한다. 연속식은 전방 차분을 통해 이산화되어, MPC의 예측 호라이즌에 직접 사용될 수 있다.
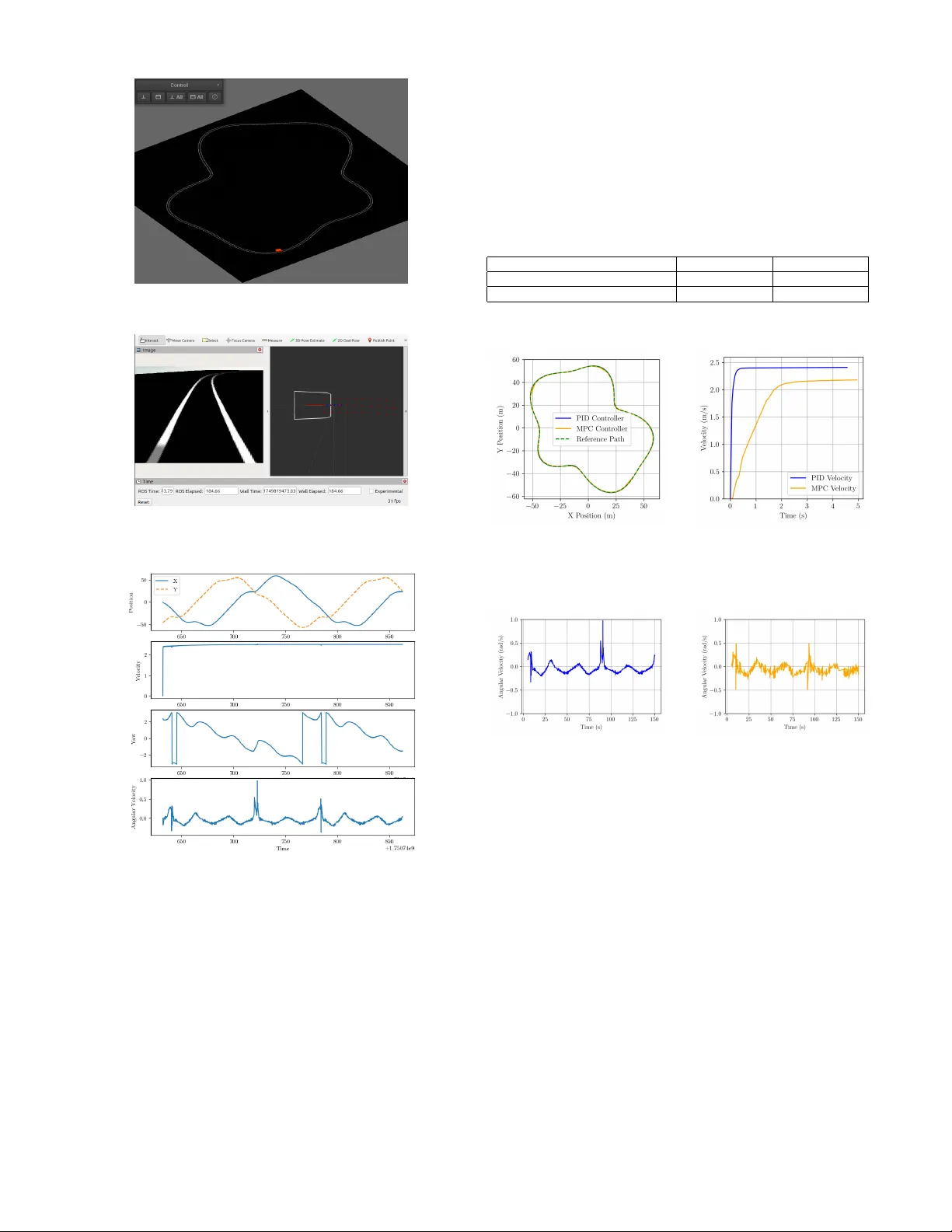
제어 모듈에서는 두 가지 알고리즘을 구현한다. PID 제어기는 속도와 스티어링 각 오차에 비례·적분·미분을 적용해 간단히 제어 신호를 생성한다. 실험에서는 PID가 경로 편차가 작고, 급격한 회전 구간에서도 일정한 속도를 유지하지만, 각속도 스파이크가 발생한다는 단점을 보였다. 반면 MPC는 목표 차선 곡선과 차량 상태를 예측 호라이즌(N_p)과 제어 호라이즌(N_c)으로 확장해, 비용 함수 J=∑(Y_ref−Y)^T Q (Y_ref−Y)+ΔU^T R ΔU 를 최소화한다. Q와 R은 각각 출력·입력 가중치를 조정하는 매트릭스로, 실험에서는 수동 튜닝을 통해 최적화하였다. 결과적으로 MPC는 속도·조향 제한을 만족하면서 부드러운 제어 신호를 제공했지만, 모델 선형화와 예측 오차로 인해 작은 진동과 평균 제곱 편차가 PID보다 크게 나타났다( lateral MSE: 0.039 m² vs 0.0136 m², angular MSE: 0.001014 rad² vs 0.000548 rad²).
실험 환경은 Ubuntu 24.04 LTS와 12세대 Intel Core i7 모바일 프로세서를 사용했으며, ROS2 토픽을 통해 시뮬레이터와 제어 노드가 실시간으로 데이터를 교환한다. rviz를 이용해 카메라 영상, 차선 검출 결과, 예측 경로 등을 시각화함으로써 디버깅과 성능 평가가 용이하도록 설계되었다. 실험은 무작위로 생성된 사인 곡선 형태의 트랙에서 여러 번 반복 수행했으며, 각 트랙에 대해 PID와 MPC의 속도·각속도 프로파일을 비교하였다.
결론적으로 MonoSIM은 저비용·오픈소스 SIL 프레임워크로, 단일 카메라 기반 차선 추적과 Ackermann 차량 제어를 손쉽게 구현·검증할 수 있다. PID와 MPC의 성능 차이를 명확히 보여주며, 향후 다중 차량 시뮬레이션, 학습 기반 인식 모듈, 하드웨어‑인‑더‑루프(HIL) 테스트 등으로 확장 가능성을 제시한다. 현재 제한점으로는 2.5D 물리 엔진에 의존해 복잡한 도로 지형·동역학 비선형성을 완전 재현하지 못한다는 점이며, 고해상도 이미지 처리·다중 센서 융합, 비선형 모델 기반 고급 제어기의 통합이 향후 연구 과제로 남는다. 전체 소스 코드는 GitHub(https://github.com/shantanu404/monosim.git)에서 공개되어, 교육·연구 커뮤니티가 자유롭게 활용하고 기여할 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기