스펙트럼 분해를 이용한 확산 과정 최적 제어와 순환 흐름 생성
본 논문은 2차원 확산 과정의 확률 밀도 함수를 기술하는 포커-플랑크 방정식에 대해, 고유함수 전개를 이용한 차원 축소 기법을 적용한 최적 제어 프레임워크를 제시한다. 제어 목적은 (i) 확률 밀도 함수가 정 stationary 분포에 빠르게 수렴하도록 가속하고, (ii) 정 stationary 상태에서 원하는 순환(flux rotation, 즉 스칼라 와류) 를 생성하는 것이다. 비용 함수에 PDF와 플럭스 회전의 편차를 포함하고, 제한된 수…
저자: Norihisa Namura, Hiroya Nakao
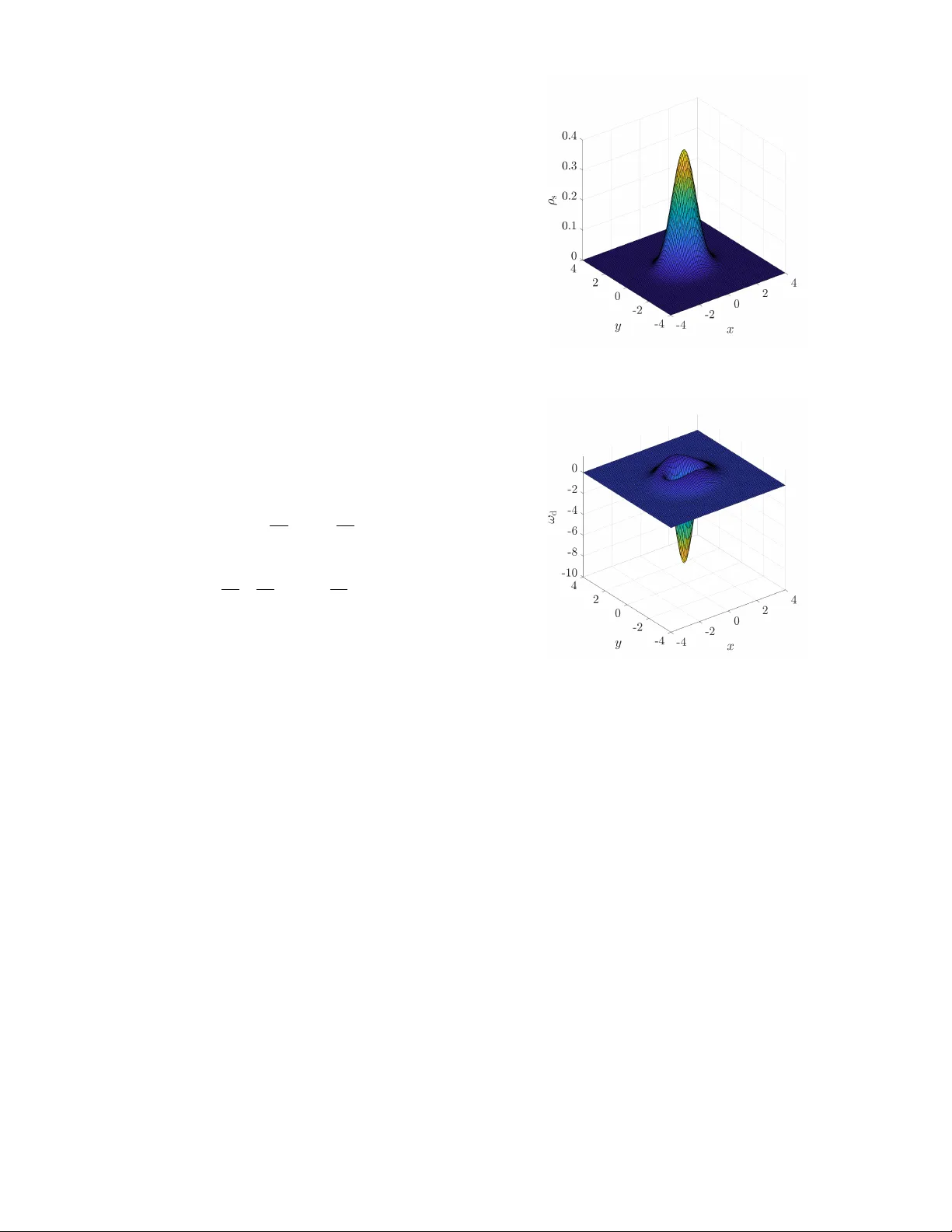
본 논문은 확률적 시스템, 특히 2차원 확산 과정에 대한 최적 제어 문제를 다룬다. 확산 과정은 Ito 형태의 SDE dX_t = −∇V(X_t)dt + √(2D)dW_t 로 기술되며, 이에 대응하는 확률 밀도 함수 ρ(x,t)는 포커‑플랑크 방정식 ∂_tρ = ∇·(ρ∇V) + DΔρ 로 표현된다. 저자는 이 방정식에 두 종류의 시간 의존 제어 입력 u_1(t), u_2(t) 를 추가한다. u_1은 스칼라 형태의 잠재 함수 α(x)와 결합해 drift에 가중치를 부여함으로써 PDF가 목표 stationary 분포 ρ_s에 빠르게 수렴하도록 가속한다. u_2는 또 다른 잠재 함수 ϕ(x)와 결합해 ρ_s에 비례하는 회전 성분 1/ρ_s ∇^⊥ϕ를 추가함으로써, 정 stationary 상태에서 원하는 플럭스 회전(와류) ω_d(x)를 생성한다.
제어 목표는 두 가지이다. 첫째, PDF와 ρ_s 사이의 L^2 거리(가중치 Q_1)를 최소화해 수렴 속도를 높인다. 둘째, 현재 플럭스 회전 ω(x,t)=∇×J̃(x,t) 와 목표 ω_d 사이의 L^2 거리(가중치 Q_2)를 최소화해 원하는 순환 흐름을 만든다. 또한 제어 입력 자체에 대한 에너지 비용(가중치 R_1,R_2)과 최종 시점 t_f에서의 PDF·와류 오차(가중치 Q_f,R_f)도 포함한다.
직접적으로 무한 차원의 FPE를 최적화하는 것은 계산적으로 불가능하므로, 저자는 고유함수 전개를 이용한다. L*v_m = λ_m v_m 로 정의된 고유값·고유함수 집합 {λ_m, v_m} 를 구하고, ρ(x,t)=∑_{m=0}^{M-1}c_m(t)v_m(x) 로 근사한다. 여기서 M은 선택된 차원 축소 정도이며, 일반적으로 몇 개의 저주파 모드만으로 충분히 정확한 근사를 얻을 수 있다. 고유함수는 ρ_s^{-1} 가중치 내적에 대해 정규직교화된다.
이 전개를 대입하면, FPE는 bilinear ODE 형태 ˙c = Λc + u_1 B_1 c + u_2 B_2 c 로 변환된다. Λ는 대각선에 고유값을, B_1·B_2는 α와 ϕ에 대한 미분 연산을 고유함수와 내적한 행렬이다. 따라서 원래의 편미분 방정식은 저차원 선형·비선형 결합 시스템으로 축소된다.
비용 함수 역시 고유함수 전개를 통해 c와 u_i 로 표현된다. L_1은 Q_1/2·‖c−c_s‖^2 로 단순화되고, L_2는 Q_2/2·‖(A_1+u_1A_2+u_2A_3)c−d‖^2 로 나타난다. 여기서 A_i 행렬은 고유함수와 V,α,ϕ의 기울기·라플라시안 연산을 내적한 결과이며, d는 목표 와류 ω_d의 고유함수 전개 계수이다. 최종 비용 φ는 Q_f/2·‖c(t_f)−c_s‖^2 + R_f/2·(u_2(t_f)−1)^2 로 구성된다.
이제 최적 제어 문제는 저차원 변수 c(t)와 입력 u_1(t), u_2(t) 를 찾는 비선형 최적화 문제로 변환된다. 저자는 Pontryagin 최소 원리를 적용해 해밀토니안 H(c,u_1,u_2,µ)=˜L_1+˜L_2+L_3+µ^T f(c,u_1,u_2) 를 정의하고, 라그랑주 승수 µ(t) 의 역방향 동역학 ˙µ=−∇_c H, 최종 조건 µ(t_f)=∇_c H|_{t_f} 를 도출한다. 최적 입력은 ∂H/∂u_i=0 조건을 만족해야 한다.
해석적 해를 구하기 어려우므로, 저자는 수치 최적화를 수행한다. MATLAB의 fminunc 함수를 이용해 입력 u_1(t), u_2(t) 를 파라미터화하고, 각 반복마다 전방 ODE (27)를 Euler 방법으로 적분해 c(t)를 얻고, 역방향 ODE (46)를 적분해 µ(t)를 구해 비용을 평가한다. 비록 목적함수가 비볼록이지만, 차원 축소 덕분에 변수 수가 적어 전역 최적화가 실용적이다.
수치 실험에서는 V(x)=2x^2+3y^2, D=2, 영역 Ω=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기