분산 희소 추정을 통한 선형‑이차 가우시안 게임
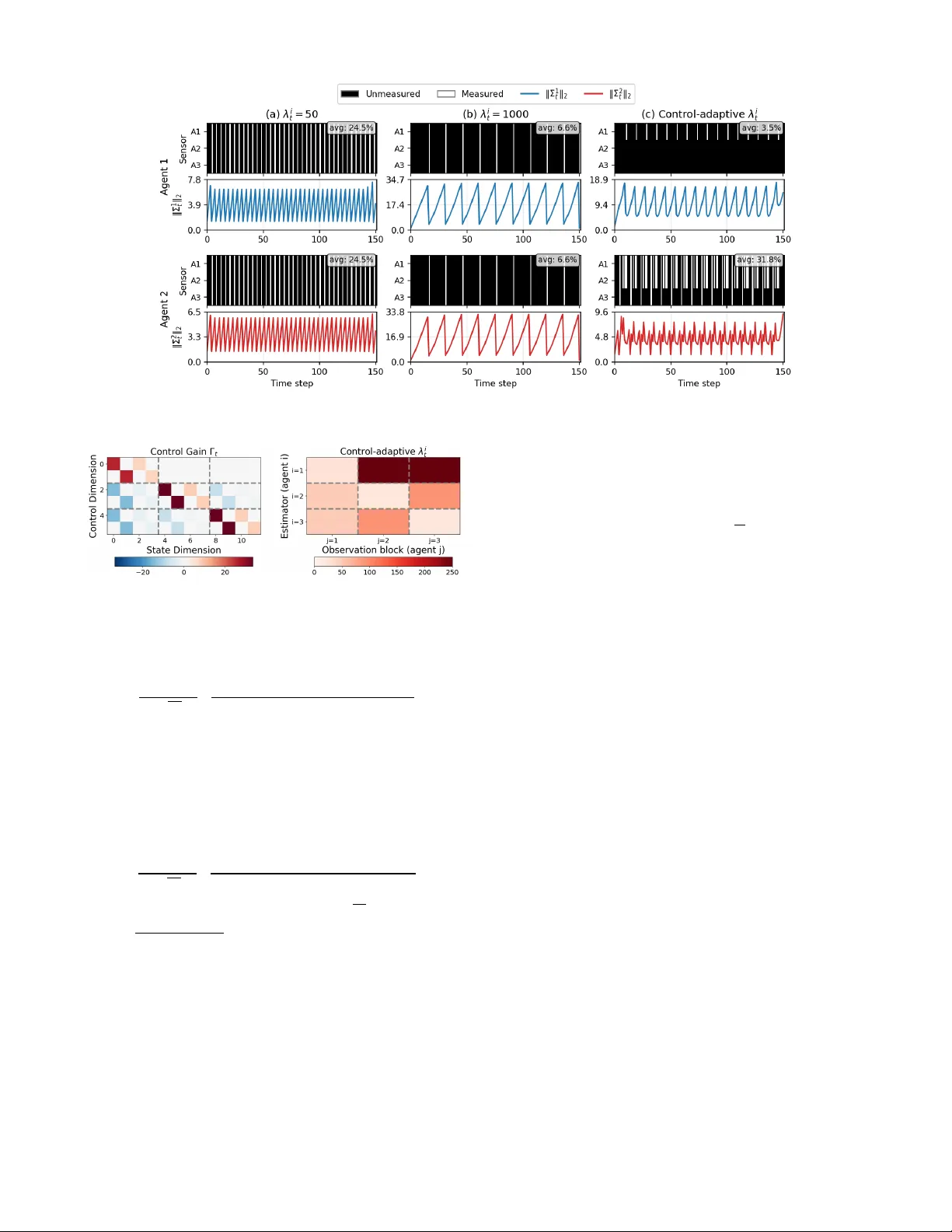
본 논문은 다중 에이전트 시스템에서 개별 에이전트가 제한된 관측 정보를 사용하도록 설계된 분산 희소 추정기를 도입하고, 이를 기반으로 피드백 내시 균형 전략을 구현한다. 그룹 라소 최적화를 통해 센서 선택을 구조적으로 희소화하고, 추정 오차 공분산이 정규화 파라미터에 의해 정의된 한계를 초과하면 최적 추정 이득으로 재설정되는 충분조건을 제시한다. 시뮬레이션은 통신 비용을 크게 절감하면서도 궤적 성능 저하를 최소화함을 보여준다.
저자: Tianyu Qiu, Filippos Fotiadis, Xinjie Liu
본 논문은 다중 에이전트 시스템에서 발생하는 선형‑이차‑가우시안(LQG) 게임을 대상으로, 각 에이전트가 제한된 관측 정보를 사용하도록 설계된 분산 희소 추정기를 제안한다. 기존 LQG 게임 연구는 일반적으로 모든 가용 관측을 이용해 상태를 추정하고, 그 추정값을 기반으로 피드백 내시 균형 전략을 도출한다. 그러나 대규모 로봇 군집, 센서 네트워크 등 자원 제약이 있는 실제 시스템에서는 모든 관측을 처리하거나 교환하는 것이 비현실적이다. 이를 해결하고자 저자는 다음과 같은 일련의 연구 과정을 전개한다.
1. **문제 설정 및 정보 구조**
N명의 에이전트가 각각 선형 동역학 x_i,t+1 = A_i,t x_i,t + B_i,t u_i,t + w_i,t 를 갖고, 개별 관측 y_i,t = C_i,t x_t + v_i,t (v_i,t는 가우시안 잡음) 를 받는다. 각 에이전트는 공동 비용 J_i를 최소화하려는 목표를 가지고 있으며, 이는 상태와 제어에 대한 이차 비용을 포함한다. 정보 구조는 모든 시스템 매개변수와 피드백 내시 이득(Γ_t, α_t)이 공유되지만, 실제 관측 y_i,t와 추정값 ˆx_i,t, 제어 u_i,t는 비공유한다.
2. **분산 추정 및 오차 전파**
각 에이전트는 자신의 관측을 이용해 추정값 ˆx_i,t를 업데이트한다. 제어 입력은 u_i,t = –Γ_i,t ˆx_i,t – α_i,t 로 정의된다. 그러나 실제 시스템에 적용되는 전체 제어 u_t는 각 에이전트가 추정한 제어 ˆu_i,t와 차이가 발생한다. 이 차이는 추정 오차 e_i,t에 추가적인 동적 항을 만든다(식 8). 따라서 오차 공분산 Σ_t는 시스템 행렬 A_t, B_t, 추정 이득 K_t 등에 의해 복합적으로 진화한다(식 9).
3. **최적(비희소) 추정 이득 도출**
개별 에이전트 i에 대해, 추정 오차 공분산 Σ_i,t를 최소화하는 최적 이득 K_i,⋆^t를 칼만 필터와 유사한 형태로 도출한다(식 11). 이 이득은 모든 센서 데이터를 활용하므로 완전 관측 상황에서의 베이스라인이 된다.
4. **그룹 라소 기반 희소화**
실제 구현에서는 센서를 P_i개의 그룹으로 나누고, 각 그룹에 대응하는 K_i,t
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기