대규모 다중 에이전트 시스템을 위한 견고한 다중 스케일 리더‑팔로워 제어
본 논문은 제한된 수의 제어 가능한 리더와 무수히 많은 비제어 팔로워가 존재하는 대규모 시스템에서, 미지의 유계 교란을 고려한 연속체(PDE) 모델을 구축하고, 리더와 팔로워의 밀도 수렴을 동시에 보장하는 피드백 제어법을 제시한다. 싱글러톤 이론과 특이 섭동 이론을 이용해 전역 비동기 수렴을 증명하고, 리더 질량의 최소 요구조건을 명시한다.
저자: Davide Salzano, Gian Carlo Maffettone, Mario di Bernardo
본 연구는 교통 네트워크, 군중 대피, 스와밍 로봇 등 실세계에서 전체 에이전트를 직접 제어할 수 없는 상황을 다루며, 소수의 제어 가능한 리더가 다수의 비제어 팔로워를 로컬 상호작용을 통해 간접적으로 조정하는 리더‑팔로워 패러다임을 채택한다. 기존 문헌은 (1) 단순하고 무교란 시스템에서 리더‑팔로워 밀도 제어, 혹은 (2) 단일 직접 제어 집단에 대한 견고 제어만을 다루었으며, 두 요소를 동시에 고려한 연구는 없었다.
**1. 모델링**
리더 N_L 와 팔로워 N_F 는 각각 (1a)와 (1b)식으로 기술된다. 리더는 제어 입력 u_i 와 내부 교란 h_i 에 의해 움직이며, 팔로워는 리더와의 상호작용 커널 f (2)와 내부 교란 g_i, 그리고 확산항 √2D W_i 에 의해 확률적으로 이동한다. 교란 h_i, g_i는 각각 유계 r, k 를 만족한다는 가정 하에, 비교 원리를 적용해 최악의 경우를 상·하한 시스템으로 변환한다.
**2. 연속체 근사**
상·하한 시스템을 평균장 한계로 전이하면, 리더와 팔로워의 밀도 ρ_L, ρ_F 는 (4a)와 (4b)식의 보존형 PDE로 기술된다. 여기서 리더는 순수 수송 방정식이며, 팔로워는 교란 ±k 와 확산 D 가 포함된 보존식이다. 상호작용 속도 v_FL 은 리더 밀도와의 컨볼루션 v_FL = f * ρ_L (5)으로 정의된다.
**3. 제어 목표**
목표는 시간 불변 목표 밀도 \barρ_F (∫\barρ_F dx = M_F) 에 팔로워 밀도가 전역적으로 수렴하도록 하는 것이다. 이를 위해 (8)‑(12)식에서 v_FL 을 피드포워드 v_FF 와 피드백 v_FB 의 가중합으로 설계하고, 피드백 흐름 q_F 에 비례항 k_Fp, 스위칭 항 k_Fs sign(e_F) 을 포함한다. 정리 1은 ∥g₁∥_∞ < 2 및 k_Fp, k_Fs 가 충분히 클 경우, Lyapunov 함수 V_F 의 미분이 음수임을 보이며, e_F 가 L₂(Ω)에서 전역적으로 지수적으로 수렴함을 증명한다.
**4. 역컨볼루션 및 리더 목표 밀도**
v_FL = f * ρ_L 관계를 이용해 목표 리더 밀도 \barρ_L 을 역컨볼루션(20)‑(21)으로 구한다. 여기서 가중치 α(t) 와 상수 C(t) 를 조정해 \barρ_L 이 비음이면서 전체 리더 질량 M_L 에 정확히 맞춰지도록 만든다. α는 (25)식에 따라 M_FF 와 M_FB 의 질량 비율에 기반해 선택되며, 이는 리더 자원의 효율적 배분을 의미한다.
**5. 리더 제어**
리더는 (30)‑(32)식의 피드포워드‑피드백 제어법으로 설계된다. 제어 입력 u 는 리더 밀도 ρ_L 가 \barρ_L 을 추적하도록 하며, 교란 ±r 을 억제하기 위해 비례항 k_Lp 와 스위칭 항 k_Ls sign(e_L) 을 포함한다. 이 제어법은 Lyapunov 함수 V_L 에 대해 V̇_L ≤ −k_Lp V_L 을 만족시켜, e_L 이 지수적으로 0에 수렴함을 보장한다.
**6. 결합 안정성 및 특이 섭동 분석**
리더와 팔로워는 (33a)‑(33b)식으로 결합된 동역학을 갖는다. 팔로워 Lyapunov 미분에 나타나는 추가 항은 리더 추적 오차 e_L 과의 컨볼루션 형태이며, Young’s 부등식으로 √V_F √V_L 형태로 제한된다. 정리 2는 k_Lp 를 충분히 크게 잡으면(즉, 리더가 팔로워보다 빠른 시간 스케일을 가짐) 특이 섭동 이론에 의해 전체 시스템이 전역적으로 안정함을 증명한다.
**7. 최소 리더 질량 조건**
α 와 C 의 선택이 리더 질량 M_L 에 영향을 미치므로, (27)‑(29)식에서 리더 질량에 대한 하한을 도출한다. 특히 교란 상한 k 가 증가하면 M_L 은 선형적으로 증가한다는 점에서, 이는 연속체 “herdability” 조건을 정량화한 결과이다.
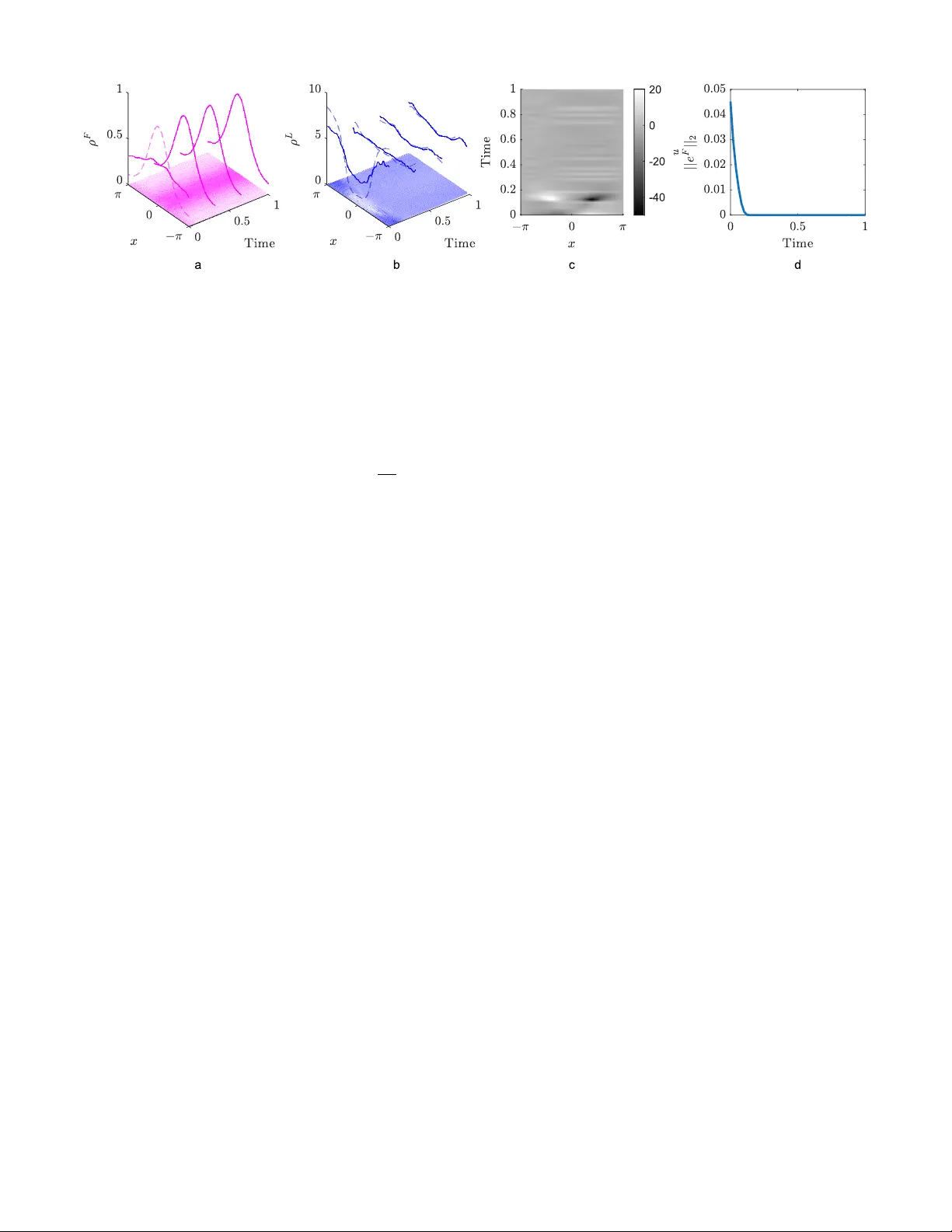
**8. 시뮬레이션**
이론적 결과를 검증하기 위해 이질적인 편향 랜덤 워커 집단을 대상으로 수치 실험을 수행하였다. 시뮬레이션은 (i) 교란 강도 증가, (ii) 리더 수 감소, (iii) 유한 에이전트 수에 대한 견고성을 보여주며, 제안된 제어법이 목표 밀도에 대한 전역 수렴과 교란 억제를 동시에 달성함을 확인한다.
결론적으로, 본 논문은 제한된 리더 자원과 미지의 유계 교란이 존재하는 대규모 다중 에이전트 시스템에 대해, 연속체 기반 다중 스케일 모델링, 보수적 상·하한 설계, 역컨볼루션을 통한 물리적 밀도 재구성, 그리고 특이 섭동 이론을 활용한 결합 안정성 분석이라는 일련의 체계적인 방법론을 제시한다. 이를 통해 실시간으로 목표 밀도 프로파일을 구현하고, 리더 질량의 최소 요구조건을 명시함으로써, 교통 흐름 제어, 군중 관리, 로봇 스와밍 등 다양한 응용 분야에 적용 가능한 견고하고 확장 가능한 제어 프레임워크를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기