통신 지연을 고려한 다중 로봇 시스템의 합의 설계와 실험 검증
본 논문은 연결된 무향 그래프 상에서 일정한 균일 지연과 비균일 지연을 동시에 고려한 합의 알고리즘을 제안한다. 복소해석의 Rouché 정리와 Lyapunov 기반 LMI 기법을 이용해 수렴 조건을 명시적으로 도출하고, 지연에 따라 가중 평균 형태의 최종 합의값이 결정됨을 증명한다. 이론적 결과는 시뮬레이션과 QBOT3 로봇 군집 실험을 통해 검증되며, 로봇 무리의 라인드스톤 문제 해결에 적용 가능함을 보여준다.
저자: Shokoufeh Naderi, Maude Blondin, Sébastien Roy
본 논문은 다중 에이전트 시스템(MAS)에서 통신 지연이 존재할 때도 안정적인 합의를 달성하기 위한 이론적 틀과 실험적 검증을 제공한다. 연구는 크게 네 부분으로 구성된다.
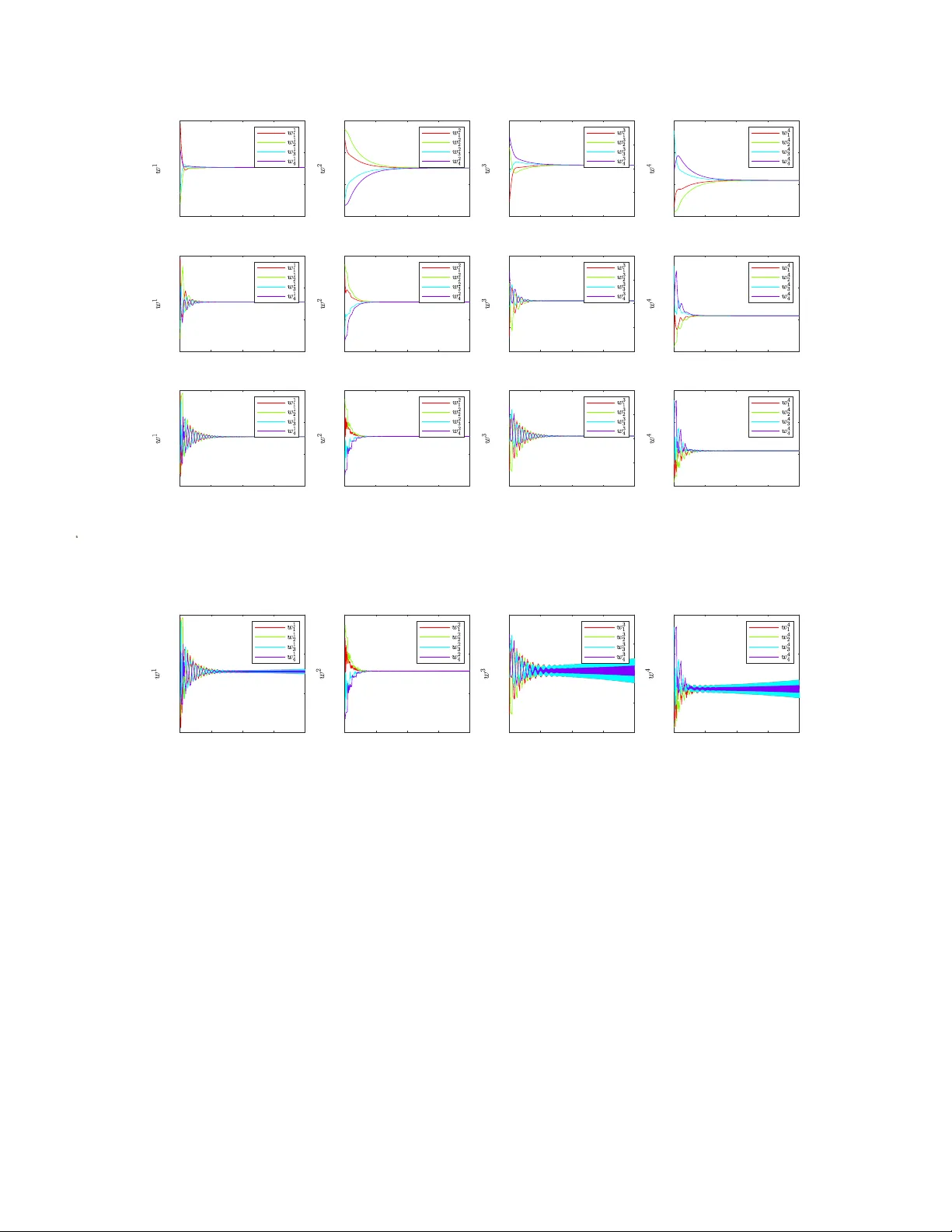
첫 번째 부분에서는 문제 설정을 명확히 한다. n개의 에이전트가 연결된 무향 그래프 G(V,E) 위에서 상호작용하며, 각 에이전트 i는 우선순위 벡터 w_i(k)∈ℝ¹ˣⁿ을 유지한다. 업데이트 규칙은
w_i(k+1)=w_i(k)+c∑_{j∈N_i}
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기