이동형 안테나와 빔포밍을 동시에 최적화하는 딥러닝 프레임워크
본 논문은 다중 사용자 다운링크 시스템에서 이동형 안테나(MA)의 위치 선정과 빔포밍 가중치를 공동으로 최적화하는 문제를 다룬다. 이산적인 안테나 위치와 연속적인 빔포밍 변수, 그리고 안테나 간 최소 거리 제약을 동시에 만족해야 하는 난제에 대해, 위치 선정 전용 그래프 신경망(GNN) 기반 인코더‑디코더와 빔포밍 전용 GNN 모델을 결합한 엔드‑투‑엔드 딥러닝 프레임워크를 제안한다. 제안 방식은 확률적 위치 선택과 정책 그래디언트 학습을 이용…
저자: Yikun Wang, Yang Li, Zeyi Ren
본 논문은 이동형 안테나(MA)와 유체 안테나 기술이 제공하는 동적 위치 조정 능력을 활용해, 다중 사용자(MU) 다운링크 시스템에서 안테나 위치와 빔포밍을 동시에 최적화하는 새로운 문제를 정의한다. 시스템 모델은 베이스 스테이션(BS)이 M개의 MA를 보유하고, 각 MA는 2차원 직사각형 영역 내 N≫M개의 샘플링 포인트(SP) 중 하나에 배치될 수 있다고 가정한다. K명의 단일 안테나 UE가 존재하며, 각 UE에 대한 채널 벡터 ˜h_{nk}는 사전에 알려져 있다.
목표는 합계 전송률 R(A,w;h)=∑_{k=1}^K log2(1+SINR_k)를 최대화하면서, (2b) 안테나 간 최소 거리 d_min, (2c) 전송 전력 제한 P_max, (2b)와 (2c) 이산적인 위치 선택 제약을 동시에 만족하는 것이다. 이 문제는 안테나 위치 A가 이산 변수이고, 빔포밍 가중치 w가 연속 변수이며, 두 변수 사이에 복합적인 제약이 존재하기 때문에 NP‑hard한 조합 최적화 문제로 분류된다.
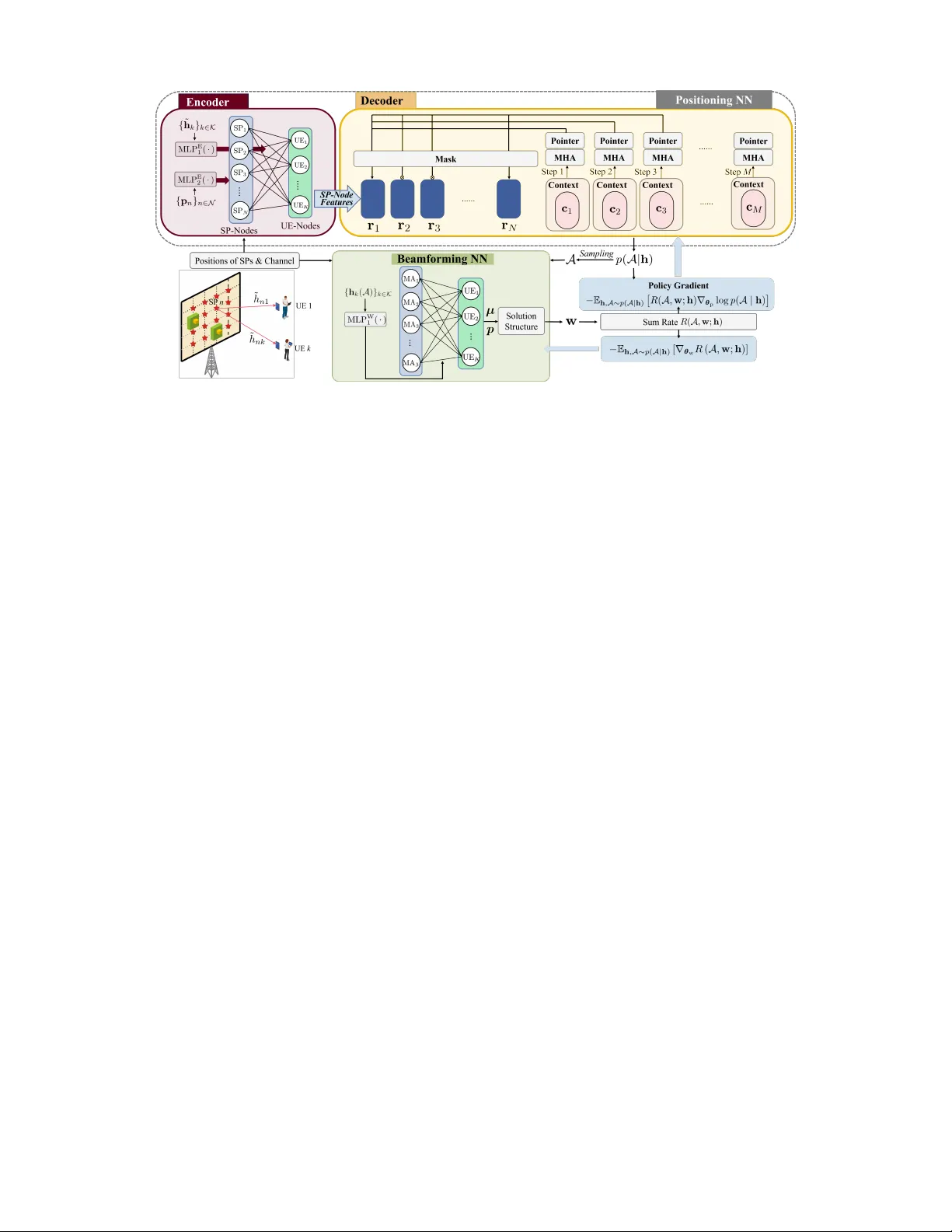
이를 해결하기 위해 저자는 두 개의 신경망을 순차적으로 연결한 엔드‑투‑엔드 딥러닝 프레임워크를 제안한다. 첫 번째 네트워크인 위치 선정 모델 F_p(·)는 시스템 파라미터 h를 입력으로 받아, 안테나 위치 집합 A를 확률적 방식으로 출력한다. 구체적으로, 조건부 확률 p(A|h)를 순차적인 factorization p(A|h)=∏_{t=1}^M p(a_m(t)|A_{t-1},h) 형태로 표현하고, 이를 학습하기 위해 그래프 신경망(GNN) 기반 인코더‑디코더 구조를 설계한다.
인코더는 UE‑노드와 SP‑노드로 구성된 이분 그래프에 엣지 피처 e_{nk}^0=MLP_E1(Re{˜h_{nk}},Im{˜h_{nk}})와 노드 피처 f_{SP,n}^0=MLP_E2(p_n)를 초기화한다. 이후 L_E 단계에 걸쳐 노드‑엣지 업데이트 식(6)-(8)을 적용해 각 SP에 대한 임베딩 r_n을 얻는다. 이 임베딩은 안테나 배치 적합성을 내재한다.
디코더는 현재까지 선택된 안테나 집합 A_{t-1}와 전체 임베딩 R을 이용해 컨텍스트 벡터 c_t를 생성하고, 멀티‑헤드 어텐션(MHA)으로 각 SP와의 관련성을 계산한다. 최소 거리 제약을 만족하도록 마스크를 적용해, 거리 위반 SP와 이미 선택된 SP는 점수를 -∞ 로 설정한다. 이후 포인터 메커니즘을 통해 정규화된 확률 p(a_m(t)=n|A_{t-1},h)를 얻고, 이를 샘플링해 다음 안테나 위치를 결정한다. 학습 단계에서는 REINFORCE 기반 정책 그래디언트(19)를 사용해 비미분 가능한 샘플링 과정을 미분 가능하게 만든다.
두 번째 네트워크인 빔포밍 모델 F_w(A,h)는 최적 구조식(15)를 활용한다. 이 식은 각 UE k에 대한 빔포밍 벡터 w_k를 두 개의 저차원 파라미터 µ_k와 p_k만으로 표현한다. 여기서 µ_k와 p_k는 전력 제약을 만족하도록 softmax 정규화된 값이며, ∑_k µ_k = ∑_k p_k = P_max을 만족한다. 이러한 구조적 정보를 이용해, 저차원 파라미터 예측을 위해 ENGNN을 설계한다. ENGNN은 MA‑노드와 UE‑노드 사이에 엣지를 두고, 엣지 피처를 채널 실수·허수 부분을 MLP_W1로 변환해 초기화한다. L_W 단계의 업데이트 후, 각 UE‑노드 피처를 FC 레이어에 통과시켜
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기