반대 행동으로 강화학습 효율을 높이다: 무비용 경험 수집의 새로운 패러다임
본 논문은 고차원 상태공간을 갖는 MDP에서 에이전트가 추가적인 연산 비용 없이 더 풍부한 경험을 얻도록, 상태‑액션 가치 함수를 최소화하는 “반대 행동”(counteractive action) 전략을 제안한다. 이 전략은 TD‑오차를 인위적으로 크게 만들어 샘플 효율성을 높이며, 기존 딥 RL 알고리즘에 플러그‑인 형태로 적용 가능함을 실험적으로 입증한다.
저자: Ezgi Korkmaz
본 논문은 고차원 상태 표현을 갖는 마코프 결정 과정(MDP)에서 딥 강화학습 에이전트가 추가적인 계산 비용 없이 더 효율적인 경험을 수집할 수 있는 새로운 패러다임을 제시한다. 기존 연구들은 주로 ε‑greedy와 같은 단순한 무작위 탐색 혹은 카운팅 기반의 복잡한 탐색 기법을 사용했으며, 이들은 샘플 효율성 측면에서 한계가 있었다. 저자들은 이러한 한계를 극복하기 위해 ‘반대 행동(counteractive action)’이라는 개념을 도입한다. 이는 현재 Q‑함수에서 가장 낮은 값을 갖는 행동을 선택함으로써, 초기 단계에서 거의 무작위인 Q‑함수와 최적 Q‑함수 사이의 차이를 이용해 TD‑오차를 인위적으로 크게 만든다.
이를 이론적으로 뒷받침하기 위해 논문은 먼저 η‑uninformed와 δ‑smooth라는 두 가지 정의를 제시한다. η‑uninformed는 Q‑함수가 초기에는 보상 기대값에 대해 거의 정보를 제공하지 않음을 의미하고, δ‑smooth는 상태 전이 후 Q‑값이 크게 변동하지 않는 성질을 나타낸다. 이러한 가정 하에, 최소 Q값 행동이 평균적인 무작위 행동보다 더 큰 TD‑오차를 만든다는 정리 3.4와 double‑Q 상황에서도 동일한 결과를 보인 정리 3.6을 증명한다. 핵심은 ‘disadvantage gap’ D(s) 로, 최소 행동이 제공하는 추가적인 정보량을 정량화한다.
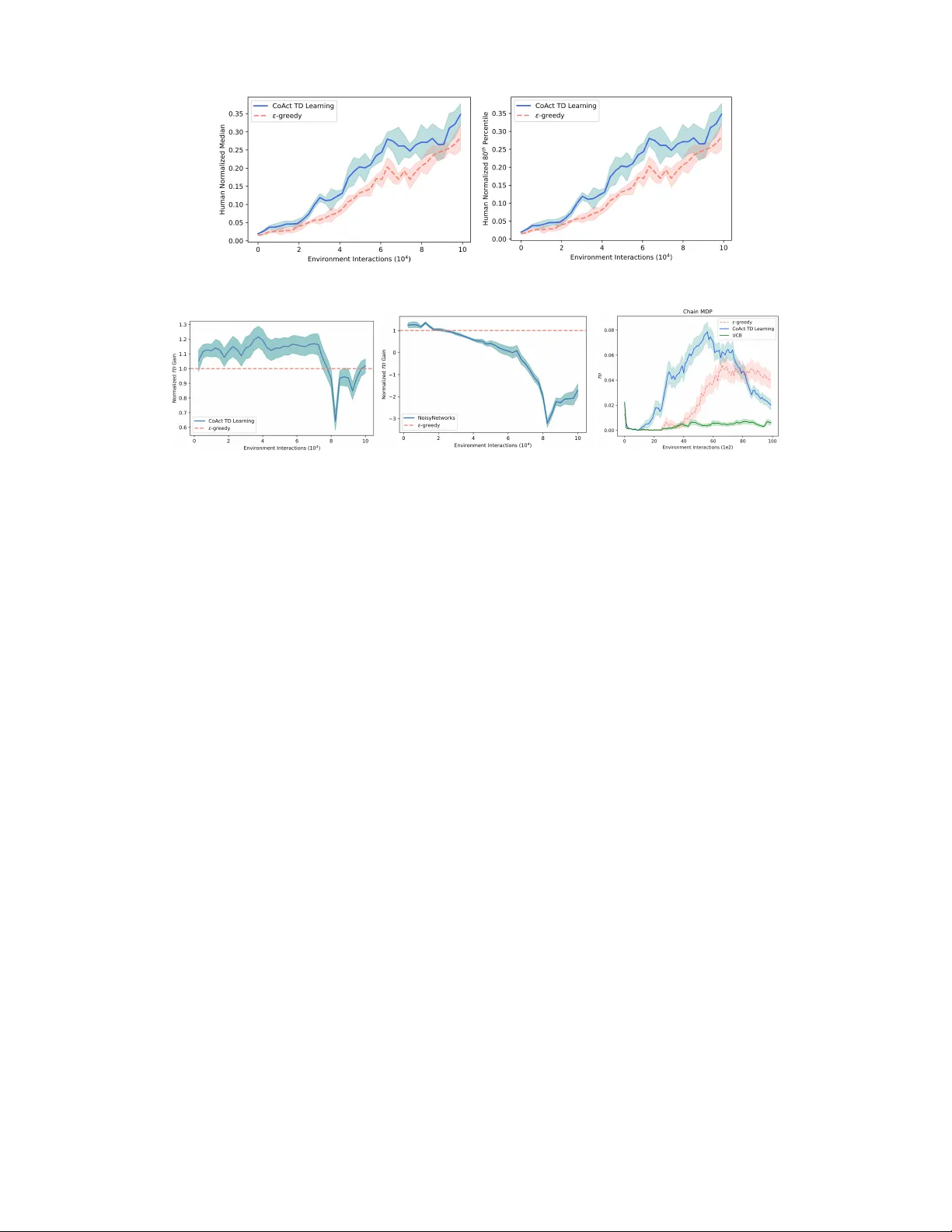
이론적 결과를 검증하기 위해 저자들은 두 가지 실험을 수행한다. 첫 번째는 고전적인 체인 MDP에서 반대 행동이 TD‑오차를 어떻게 증가시키는지를 시각화한 것이며, 두 번째는 Atari 100K 벤치마크에서 기존 최첨단 알고리즘(DQN, Rainbow, QR‑DQN 등)과 비교한 것이다. 실험 결과, 제안된 ‘CoAct TD learning’은 전체 벤치마크에서 평균 248 %의 성능 향상을 보였으며, 특히 샘플 효율성 측면에서 모델 기반 방법과 비슷한 수준에 도달했다. 또한, noisy‑networks와 같은 복잡한 탐색 기법보다도 높은 효율을 나타냈으며, 추가 파라미터나 네트워크 구조 변화를 요구하지 않는 ‘zero‑cost’ 특성을 강조한다.
논문의 주요 기여는 다음과 같다. (1) Q‑함수 최소화를 기반으로 한 새로운 경험 수집 전략을 제안하고, 이를 ‘counteractive temporal difference learning’이라 명명하였다. (2) η‑uninformed와 δ‑smooth라는 새로운 이론적 프레임워크를 도입해 최소 행동이 TD‑오차를 증가시키는 메커니즘을 정량적으로 증명하였다. (3) 기존 딥 RL 알고리즘에 플러그‑인 형태로 적용 가능하도록 설계했으며, 실험을 통해 실제 성능 향상을 입증하였다. (4) 제안 방법이 모델 기반 학습 없이도 모델 기반 수준의 샘플 효율성을 달성함을 보였다.
하지만 몇 가지 한계와 향후 과제도 존재한다. η‑uninformed와 δ‑smooth 가정이 실제 복잡한 환경에서 얼마나 성립되는지는 추가 검증이 필요하다. 최소 행동 선택이 일시적으로 낮은 보상을 초래할 수 있어, 위험 회피가 중요한 로봇 제어나 의료 분야에서는 안전성을 보장하는 추가 메커니즘이 요구된다. 현재 실험이 Atari 게임에 국한돼 있기 때문에, 연속 제어, 다중 에이전트, 혹은 고해상도 이미지 기반 환경에서의 일반화 가능성은 아직 확인되지 않았다. 향후 연구에서는 이러한 가정의 실증적 검증, 위험 관리 전략 통합, 그리고 다양한 도메인에의 적용을 통해 실제 시스템에의 이식성을 높이는 것이 필요하다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기