LiDAR‑IMU 결합 오도메트리와 VoxelMap의 수학적 통합
본 논문은 VoxelMap 기반의 tightly‑coupled LiDAR‑Inertial Odometry를 iterated error‑state Kalman filter(IESKF) 프레임워크 안에서 일관된 기호와 연산자를 사용해 전 과정(센서 전처리·상태 전파·잔차 모델·업데이트)을 명시적으로 유도한다. 특히 SO(3)와 ℝⁿ 위의 ⊞/⊟ 연산 정의, 연속·이산 IMU 동역학, 그리고 확률적 평면(plane) 표현과 그 불확실성 전파 과정을 …
저자: Zhihao Zhan
본 논문은 VoxelMap 기반의 tightly‑coupled LiDAR‑Inertial Odometry(LIO)를 수학적으로 정형화하고, 이를 iterated error‑state Kalman filter(IESKF) 프레임워크에 통합하는 과정을 단계별로 상세히 제시한다. 전체 흐름은 크게 네 부분으로 나뉜다.
1. **기본 기호와 연산자 정의**
표 1에 요약된 기호 체계와 함께, SO(3)와 ℝⁿ 위의 매니폴드 연산 ⊞/⊟을 정의한다. ⊞는 상태에 작은 변동을 적용하는 연산이며, ⊟는 두 상태 사이의 차이를 리터럴 벡터로 반환한다. 이는 특히 회전 행렬에 대한 Exp와 Log 맵을 이용해 구현된다(식 1). 복합 매니폴드 M=SO(3)×ℝⁿ에 대해서도 동일한 연산 규칙이 유지된다.
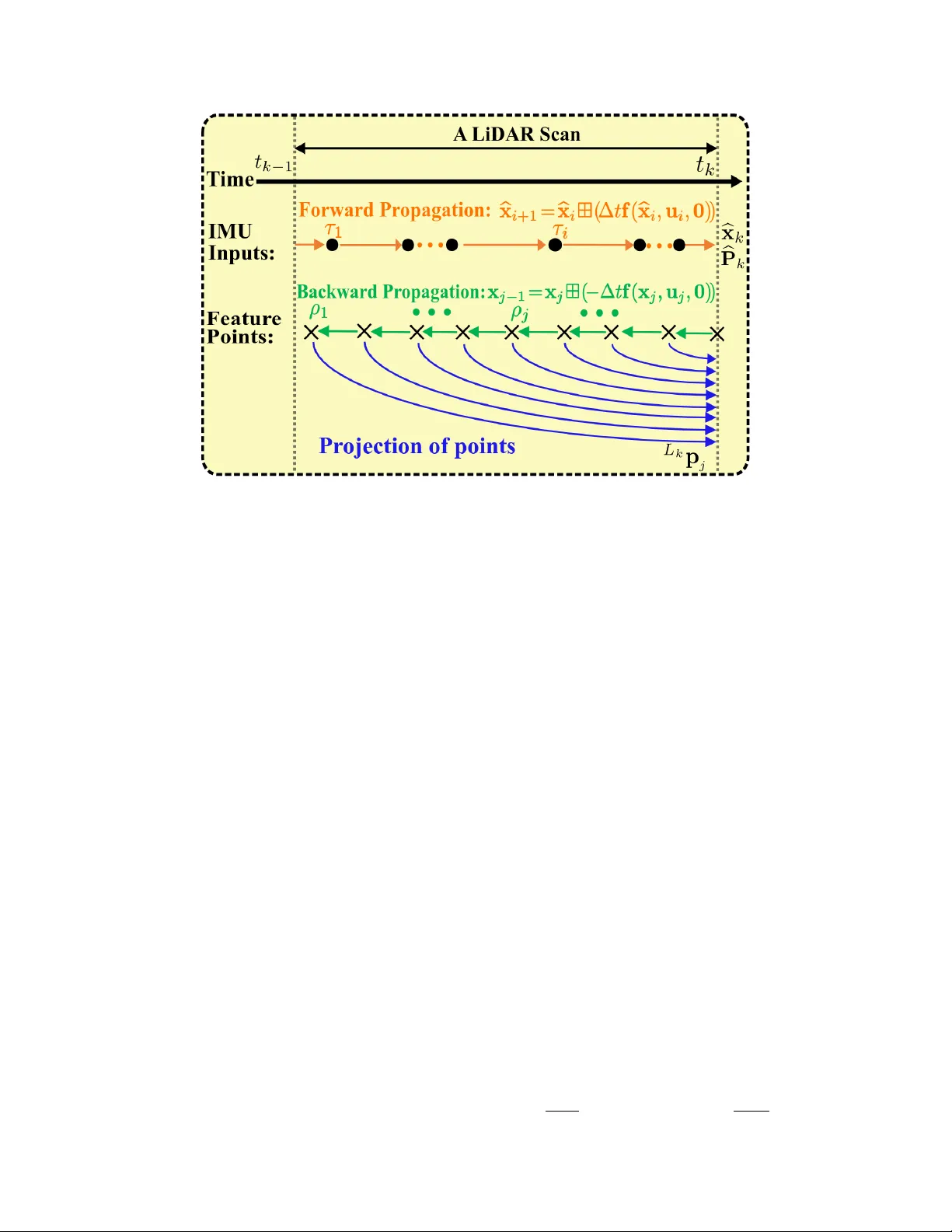
2. **연속·이산 IMU 동역학**
IMU가 LiDAR에 강체적으로 부착된 것으로 가정하고, 전역 프레임 {G}를 초기 IMU 프레임과 일치시킨다. 연속 시간 모델(식 2)은 위치·속도·자세·바이어스·중력의 미분 방정식을 제시하고, 측정식(식 3)에서 가속도·각속도에 바이어스와 백색 가우시안 노이즈를 포함한다. 이를 기반으로 가속도·각속도 식을 재배열해 속도·자세·자세 변화식을 얻는다(식 4‑5).
이산화 단계에서는 Δt 구간에 대해 1차 근사(Exp(ωΔt), 선형 가속도 적분)를 적용해 식 7‑8을 도출한다. 최종적으로 상태 전파는 x_{i+1}=x_i⊞(Δt·f(x_i,u_i,w_i)) 형태(식 9‑10)로 표현되며, 여기서 f는 IMU 측정값과 바이어스·노이즈를 포함한다.
3. **VoxelMap의 확률적 평면 표현 및 불확실성 전파**
VoxelMap은 각 voxel이 하나의 확률적 평면을 보유하도록 설계된다. LiDAR 포인트는 거리·방위 노이즈를 갖는 3차원 벡터로 모델링되며, 이를 ⊞_{S²} 연산을 통해 실제 방향으로 변환한다(식 11‑13). 결과적으로 포인트의 오차 δL_p는 선형 결합 형태(식 14)로 표현되고, 공분산 Σ_{L_p}=A_i·
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기