최소형 리저버 컴퓨터의 다중 혼돈 어트랙터 저장 및 선택
본 연구는 10가지 최소·결정론적 리저버 토폴로지를 이용해 8개의 3차원 혼돈 시스템 중 28쌍을 동시에 학습시켰다. 저장(두 어트랙터를 동시에 재현)에는 대부분의 토폴로지가 성공했지만, 외부 큐를 이용해 원하는 어트랙터로 전환하는 선택(task switching)에서는 일관된 성능을 보이지 못했다. 토폴로지별 차이는 미미했으며, 최소형 구조는 표현력은 충분하지만 시간적 메모리 부족으로 전환 제어에 한계가 있음을 시사한다.
저자: Francesco Martinuzzi, Holger Kantz
본 논문은 ‘하나의 학습된 동적 기반이 여러 동작 모드를 동시에 수행해야 한다’는 현대 예측 모델링의 요구를, 동적 시스템 관점에서 ‘저장’과 ‘선택’이라는 두 핵심 메커니즘으로 분해한다. 저장은 동일한 리저버 내부에 여러 안정적인 어트랙터(혼돈 시스템)를 동시에 내재시키는 능력이며, 선택은 외부 컨텍스트(큐) 신호에 따라 적절한 어트랙터로 시스템을 전이시키는 능력이다. 기존 연구에서는 대규모 무작위 연결 네트워크가 풍부한 내부 다이내믹스를 제공해 다중 어트랙터 학습에 필수적이라고 주장했지만, 최근 최소·결정론적 리저버가 단일 혼돈 시스템 예측에서 무작위 리저버와 동등한 성능을 보인다는 사실에 착안해, 최소 구조가 다중 어트랙터에도 적용 가능한지를 체계적으로 검증한다.
연구는 10가지 최소·결정론적 토폴로지를 선정하였다. 이들은 모두 10차원 상태 공간을 가지며, 비제로 가중치는 동일한 크기와 부호를 갖는다. 구체적인 구조는 다음과 같다. (1) Delay Line(DL): 일렬로 연결된 단순 지연 구조. (2) Delay Line with Feedback(DLFB): DL에 앞뒤 피드백 연결 추가. (3) Simple Cycle(SC): 순환 구조. (4) Cycle with Jumps(CJ): SC에 고정 거리 점프 연결 추가. (5) Self‑Loop Cycle(SLC): SC에 자기루프 추가. (6) Self‑Loop Feedback Cycle(SLFB): SLC에 피드백 연결 포함. (7) Self‑Loop Delay Line with Backward connections(SLDB): 지연선에 자기루프와 뒤쪽 2단계 연결. (8) Self‑Loop Forward Cycle(SLFC): 자기루프와 2단계 전방 연결만 존재. (9) Forward Connections(FC): SLFC에서 자기루프 제외. (10) Double Cycle(DC): 양방향 두 개의 순환 구조.
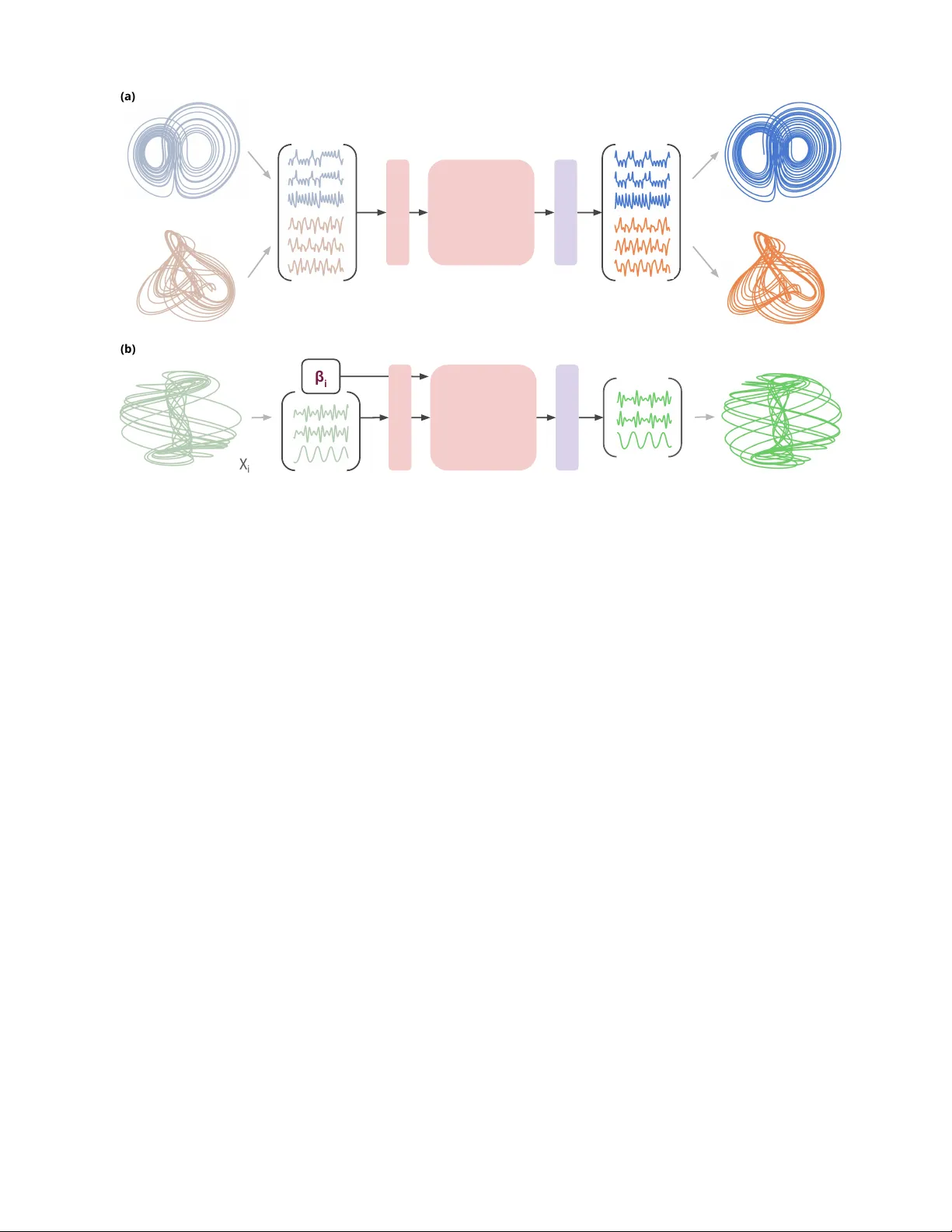
실험 대상은 8개의 3차원 혼돈 시스템(예: 로렌즈, 체르노프, Rössler 등)이며, 이들로부터 순서가 없는 28개의 시스템 쌍을 구성하였다. 각 시스템 쌍에 대해 두 가지 학습 프로토콜을 적용한다. 첫 번째는 ‘블렌딩 기법(Blending Technique, BT)’으로, 하나의 ESN에 두 시스템의 시계열을 동시에 학습시켜 폐쇄 루프 자가예측 모드에서 각각의 어트랙터를 독립적으로 재현하도록 한다. 두 번째는 ‘파라미터 가중치(Parameter‑Aware, PA)’ 방식으로, 외부 큐 신호가 주어질 때마다 목표 어트랙터를 전환하도록 학습한다.
BT 실험에서 모든 토폴로지는 높은 재현 정확도(NRMSE < 0.1)를 달성했으며, 토폴로지 간 차이는 통계적으로 유의미하지 않았다. 이는 최소·결정론적 구조가 충분히 풍부한 비선형 변환을 제공해 다중 어트랙터를 동시에 표현할 수 있음을 보여준다. 특히, 스펙트럴 반경(ρ)과 누수 계수(α)를 최적화했을 때, 저장 성능은 무작위 대규모 리저버와 동등하거나 약간 우수한 경우도 있었다.
반면 PA 실험에서는 대부분의 토폴로지가 전환 성공률이 60% 이하로 낮았다. 전환 과정에서 초기 과도 현상이 크게 나타나 재현 오류가 급증했으며, 일부 토폴로지는 전환 직후 시스템이 원래 어트랙터로 복귀하는 현상을 보였다. 저자들은 이를 ‘시간적 메모리 부족’으로 해석한다. 최소 토폴로지는 피드백 루프나 장기 의존성을 제공하는 연결이 제한적이어서, 외부 큐가 내부 상태에 충분히 영향을 미치기 전에 기존 내부 다이내믹스가 지배적으로 작동한다. 결과적으로 큐 신호가 일시적인 교란에 그쳐, 원하는 어트랙터로의 안정적 전이를 이루지 못한다.
하이퍼파라미터 탐색 결과, 스펙트럴 반경을 크게 늘리거나 누수 계수를 조정해도 특정 토폴로지가 선택 과제에서 일관된 우위를 보이지 않았다. 이는 최소형 구조가 ‘저장’에는 충분하지만, ‘선택’을 위한 제어용 메모리 혹은 상태 전이 경로가 별도로 설계되지 않으면 신뢰성 있는 전환이 어려움을 의미한다.
논문은 이러한 결과를 바탕으로 몇 가지 시사점을 제시한다. 첫째, 최소·결정론적 리저버는 파라미터 수와 학습 비용을 크게 줄이면서도 다중 혼돈 어트랙터를 저장할 수 있다. 둘째, 선택 메커니즘을 구현하려면 장기 메모리와 피드백을 강화하는 설계가 필요하다. 예를 들어, 가변 가중치, 비선형 피드백, 다중 레이어 구조, 혹은 외부 메모리(컨텍스트 모듈)를 도입해 큐 신호가 내부 상태에 지속적인 영향을 미치게 해야 한다. 셋째, 토폴로지 선택이 성능에 미치는 영향은 저장 단계에서는 미미하지만, 선택 단계에서는 토폴로지와 메모리 구조의 상호작용이 핵심이 될 가능성이 있다.
결론적으로, 최소·결정론적 리저버는 다중 혼돈 시스템을 하나의 모델에 저장하는 데 충분한 표현력을 갖추고 있으나, 외부 컨텍스트에 따라 어트랙터를 전환하는 선택 메커니즘은 현재 설계로는 신뢰성이 낮다. 이는 복잡한 다중 모드 시스템을 하나의 고정된 동적 서브스트레이트에 구현하려는 경우, 저장과 선택을 별개의 설계 목표로 고려해야 함을 시사한다. 향후 연구에서는 메모리 용량을 강화하고, 선택을 위한 제어 신호와의 상호작용을 최적화하는 새로운 토폴로지 혹은 하이브리드 구조를 탐색하는 것이 필요하다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기