입력 제약을 고려한 단조 제어 시스템의 안정화
본 논문은 최대 단조 연산자로 기술되는 비선형 유한·무한 차원 시스템에 대해, 입력 제약을 만족하면서도 목표 평형점으로 수렴하는 간단한 포화 출력 피드백을 제안한다. 핵심은 제어 입력을 제약 집합에 정사영하는 방식으로, 단조성에 의해 얻어지는 비팽창성으로 안정성을 보장한다. VO‑VS(출력 소멸 ⇒ 상태 소멸) 조건을 이용해 수렴을 증명하고, 열·파동 방정식 및 포트‑해밀턴 시스템에 적용 사례를 제시한다.
저자: Till Preuster, Hannes Gern, t
본 논문은 입력 제약이 존재하는 비선형 및 무한 차원 제어 시스템에 대해, 구조적으로 단순하면서도 전역적인 안정성을 보장하는 출력 피드백 설계 방법을 제시한다. 시스템 모델은 Hilbert 공간 X와 입력 공간 U 위에 정의된 최대 단조 연산자 M과 유한 차원의 선형 입력 연산자 B∈L(U,X)를 사용해 ˙x(t)=−M(x(t))+Bu(t), y(t)=B* x(t) 형태로 기술된다. 이 구조는 포트‑해밀턴 시스템에서 흔히 나타나는 공동 입력‑출력(colocated) 형태와 일치하며, 에너지 보존·소산 관계를 자연스럽게 반영한다.
전통적인 부정 피드백 u=−K y는 시스템에 댐핑을 제공해 안정성을 확보하지만, 입력이 제한된 경우 제약을 위반한다. 이를 해결하기 위해 저자는 목표 평형점 (x★,u★)와 입력 제약 집합 F⊂U(폐집합, 볼록)를 이용해 포화 피드백 u=PF(u★−B*(x−x★))를 제안한다. 여기서 PF는 U에서 F로의 정사영 연산자이며, u★∈int F라는 가정 하에 평형점이 제약 내부에 존재함을 보장한다. 정사영 연산자는 ‘firmly nonexpansive’ 성질을 가지므로, Lemma 3.1을 통해 ⟨PF(v)−PF(w),v−w⟩≥‖PF(v)−PF(w)‖²가 성립한다. 이를 이용해 K(x)=−B PF(u★−B*(x−x★))가 단조임을 증명하고, M와의 합 Mcl=M+K가 최대 단조 연산자가 됨을 Lemma 3.2에서 확인한다. 따라서 폐루프 시스템은 −Mcl에 의해 생성되는 비팽창 반동반 semigroup Scl(t)를 갖는다.
안정성 분석의 핵심은 VO‑VS(Vanishing Output Vanishing State) 속성이다. 정의 2에 따르면, 시스템이 VO‑VS를 만족하면 출력 y(t)=B* x(t) 가 영으로 수렴할 때 상태 x(t)도 목표 상태 x★로 수렴한다. 이는 선형 시스템에서는 detectability와 동등함을 Subsection 3.2에서 증명한다. Theorem 3.7은 VO‑VS가 성립하면 모든 초기 상태 x₀∈D(M) 에 대해 Scl(t)x₀→x★임을 보인다. 증명은 먼저 Theorem 3.6(비팽창 연산자에 대한 수렴 기준)을 적용해 Mcl의 영점 집합이 {x★}임을 확인하고, 이후 VO‑VS를 이용해 영점이 유일함을 확정한다.
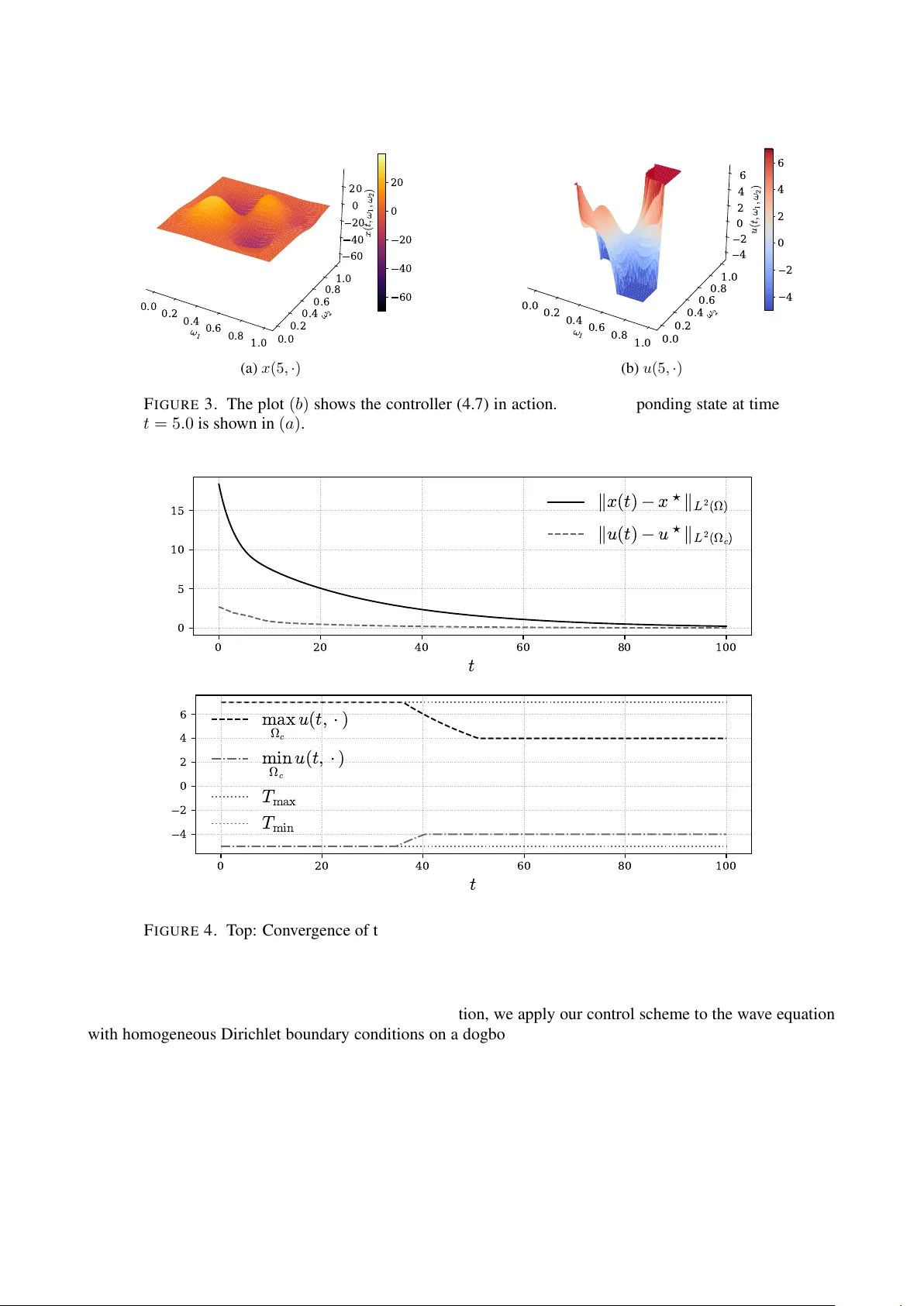
논문은 세 가지 사례를 통해 이론을 검증한다. 첫 번째는 열 방정식(∂tθ=Δθ+Bu)이며, B는 경계에 작용하는 입력 연산자이다. 두 번째는 파동 방정식(∂ttw=Δw+Bu)으로, 동일한 공동 입력‑출력 구조를 가진다. 세 번째는 비선형 포트‑해밀턴 시스템으로, 상태 공간이 유한 차원이며 M은 비선형 포텐셜의 그래디언트 연산자이다. 각 사례에서 F는 구간
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기