제한된 배리어 함수로 보장된 안전 생성 샘플링
본 논문은 사전 학습된 흐름 기반 생성 모델에 대해, 제어 장벽 함수(CBF)와 2차 계획(QP)을 이용해 샘플링 과정 전체에 안전 튜브를 삽입함으로써 하드 제약을 만족하는 샘플을 100% 보장한다. 안전 튜브는 초기 고노이즈 단계에서 완화되고, 시간에 따라 점진적으로 목표 안전 집합으로 수축한다. 제어 입력은 KL 발산을 최소화하도록 최소‧노름 QP로 설계되어, 원본 모델의 분포를 크게 왜곡하지 않는다.
저자: Darshan Gadginmath, Ahmed Allibhoy, Fabio Pasqualetti
본 논문은 안전이 필수적인 분야에서 흐름 기반 생성 모델(확산 모델, 흐름 매칭 모델, 연속 정규화 흐름 등)의 활용을 제한하는 ‘제약 만족 보장’ 문제를 해결하고자 한다. 기존의 소프트 가이드(클래스 기반, 보상 기반)와 하드 프로젝션 방식은 각각 확률적 보장 부족과 높은 계산 비용·분포 왜곡이라는 단점을 가지고 있다. 저자는 이러한 한계를 극복하기 위해 제어 이론의 ‘제어 장벽 함수(CBF)’와 ‘제한된 안전 튜브’를 도입한다.
1. **문제 정의 및 배경**
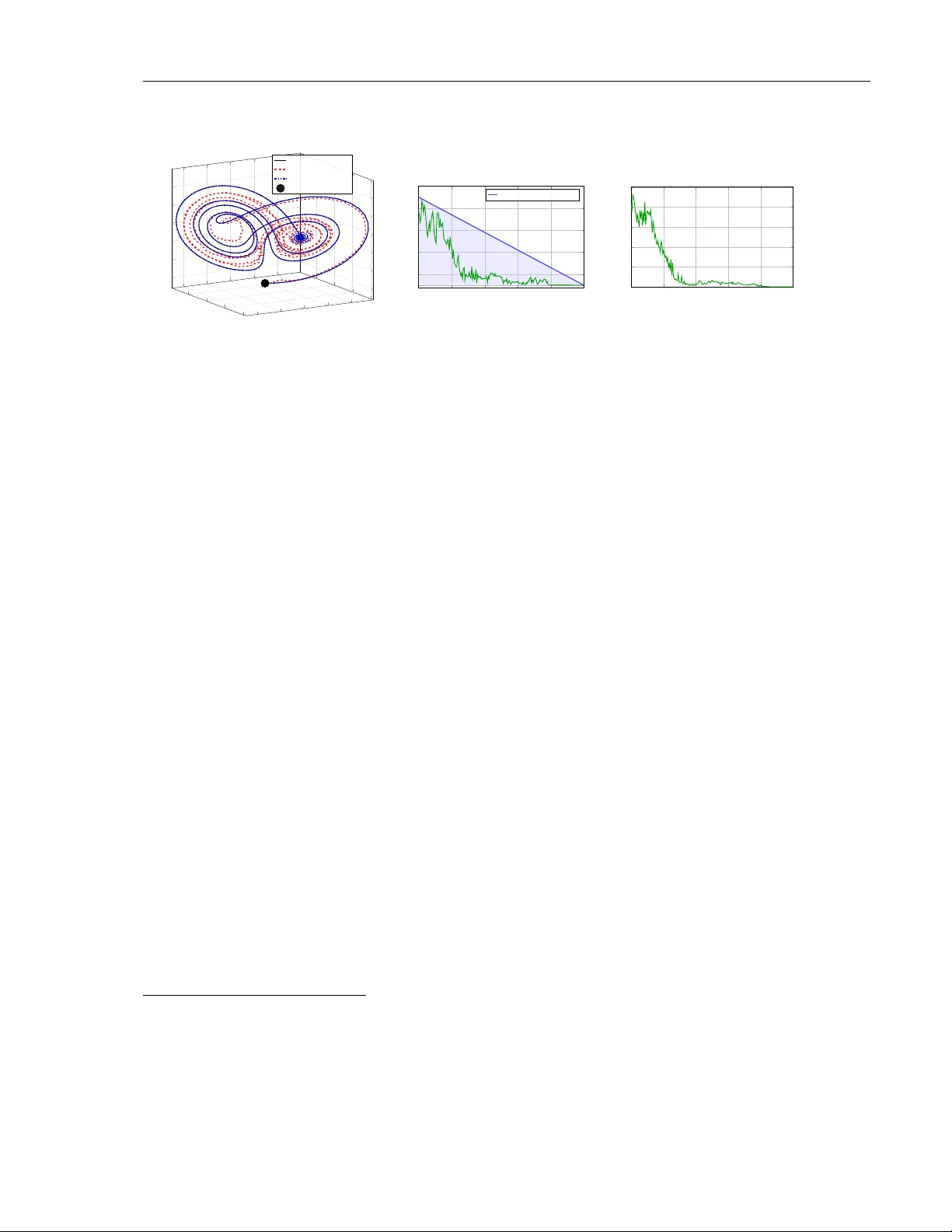
흐름 기반 모델은 초기 노이즈 분포 p_T(·)에서 시작해 역시간 SDE dx = fθ(x,t) dt + g(t) dw 로 데이터 분포 p_0(·) 로 변환한다. 이 과정에서 고노이즈 단계는 전역적인 구조만을 형성하고, 저노이즈 단계에서 세부적인 디테일이 결정된다. 따라서 제약을 강제하려면 언제, 어떻게 개입할지가 핵심이다.
2. **제어 장벽 함수와 안전 튜브 설계**
안전 집합 C는 h(x)≥0 로 정의되며, CBF 조건 ∇h·
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기