회전하는 해빙 부표와 비선형 접촉력의 다중척도 모델
본 논문은 Part I에서 제시한 비회전 부표 모델을 확장하여, 회전 자유도를 갖는 해빙 부표와 비선형 접촉·마찰 메커니즘을 포함한 입자‑동역학‑연속체 계층 구조를 구축한다. 입자 수준에서는 위치·속도·각속도·관성 모멘트를 포함한 강체로 묘사하고, 접촉 시 정상·전단 힘과 토크를 Hertz식 비선형식과 쿠롱 마찰법칙으로 구현한다. 이를 평균장 한계로 전이시켜 확장된 위상공간 위의 Vlasov‑type kinetic 방정식을 도출하고, 순간을 취…
저자: Quanling Deng, Seung-Yeal Ha, Jaemoon Lee
본 논문은 Part I에서 제시한 비회전 부표 모델을 확장하여, 회전 자유도와 비선형 접촉·마찰 메커니즘을 포함한 해빙 부표의 다중척도 모델을 체계적으로 구축한다. 연구는 크게 네 단계(입자 모델, kinetic 방정식, hydrodynamic 방정식, 수치 검증)로 전개된다.
1. **입자 모델**
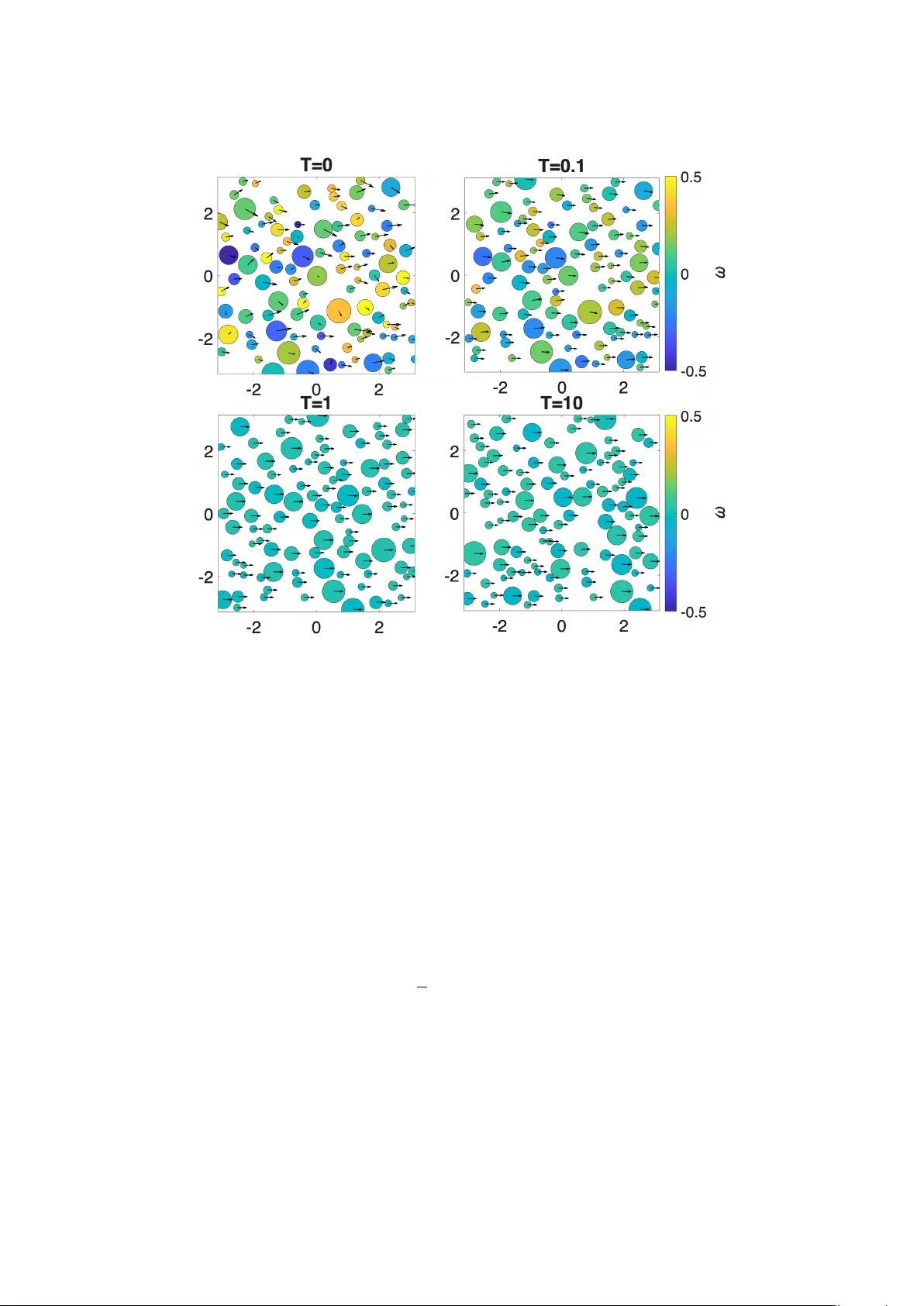
- 부표를 2차원 평면에 놓인 원통형 강체로 가정하고, 질량 mᵢ = ρ_ice π rᵢ² hᵢ와 관성모멘트 Iᵢ = mᵢ rᵢ²를 정의한다.
- 상태 변수는 위치 xᵢ, 선형속도 vᵢ, 각위치 θᵢ, 각속도 ωᵢ이며, 뉴턴‑오일러 방정식(2.1)으로 동역학을 기술한다.
- 접촉력은 정상력 fᵢⱼⁿ =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기