벡터 구면조화함수를 이용한 고속 클레시시‑가르강 텐서곱
본 논문은 E(3)‑대칭 신경망에서 핵심 연산인 클레시시‑가르강 텐서곱(CGTP)의 계산 복잡도를 기존 O(L⁶)에서 O(L⁴·log²L)으로 감소시키는 완전한 알고리즘을 제시한다. 이를 위해 스칼라 구면조화함수 대신 텐서(특히 벡터) 구면조화함수를 도입하고, 일반화된 가운트 공식과 그룹 푸리에 변환 이론을 활용한다. 새로운 연산인 벡터 신호 텐서곱(VSTP)은 기존 가운트 텐서곱의 표현력 손실을 보완하면서도 비대칭성 문제를 해결한다.
저자: YuQing Xie, Ameya Daigavane, Mit Kotak
본 논문은 3차원 공간에서 회전·이동·반사를 포함하는 E(3) 대칭을 만족하는 신경망(E(3)NN)에서 핵심 연산인 클레시시‑가르강 텐서곱(Clebsch‑Gordan Tensor Product, CGTP)의 계산 비용을 크게 낮추는 새로운 알고리즘을 제안한다. 기존 연구에서는 CGTP의 복잡도가 O(L⁶)이며, 이를 O(L⁵) 혹은 O(L⁵·log L) 수준으로 낮추려는 시도가 있었지만, 대부분은 표현력 감소에 의존하거나, 특정 상황에만 적용 가능한 제한적인 방법이었다. 특히 Xie et al. (2025)는 최근 제안된 가운트 텐서곱(Gaunt Tensor Product, GTP)이 실제 CGTP를 완전하게 대체하지 못하고, 교차곱과 같은 홀수 차수 상호작용을 놓친다고 지적하였다.
논문은 먼저 텐서곱 연산을 일반적인 “Tensor Product Operation”(TPO)으로 정의하고, 표현력 측정 지표인 “interactability”를 도입한다. 이 정의에 따라 (ℓ₁,ℓ₂,ℓ₃) 삼중이 TPO에 의해 구현될 수 있는지 여부를 판단한다. GTP는 ℓ₁+ℓ₂+ℓ₃이 짝수일 때만 상호작용을 허용하므로, (1,1,1)과 같은 교차곱은 구현되지 못한다는 것이 수학적으로 증명된다.
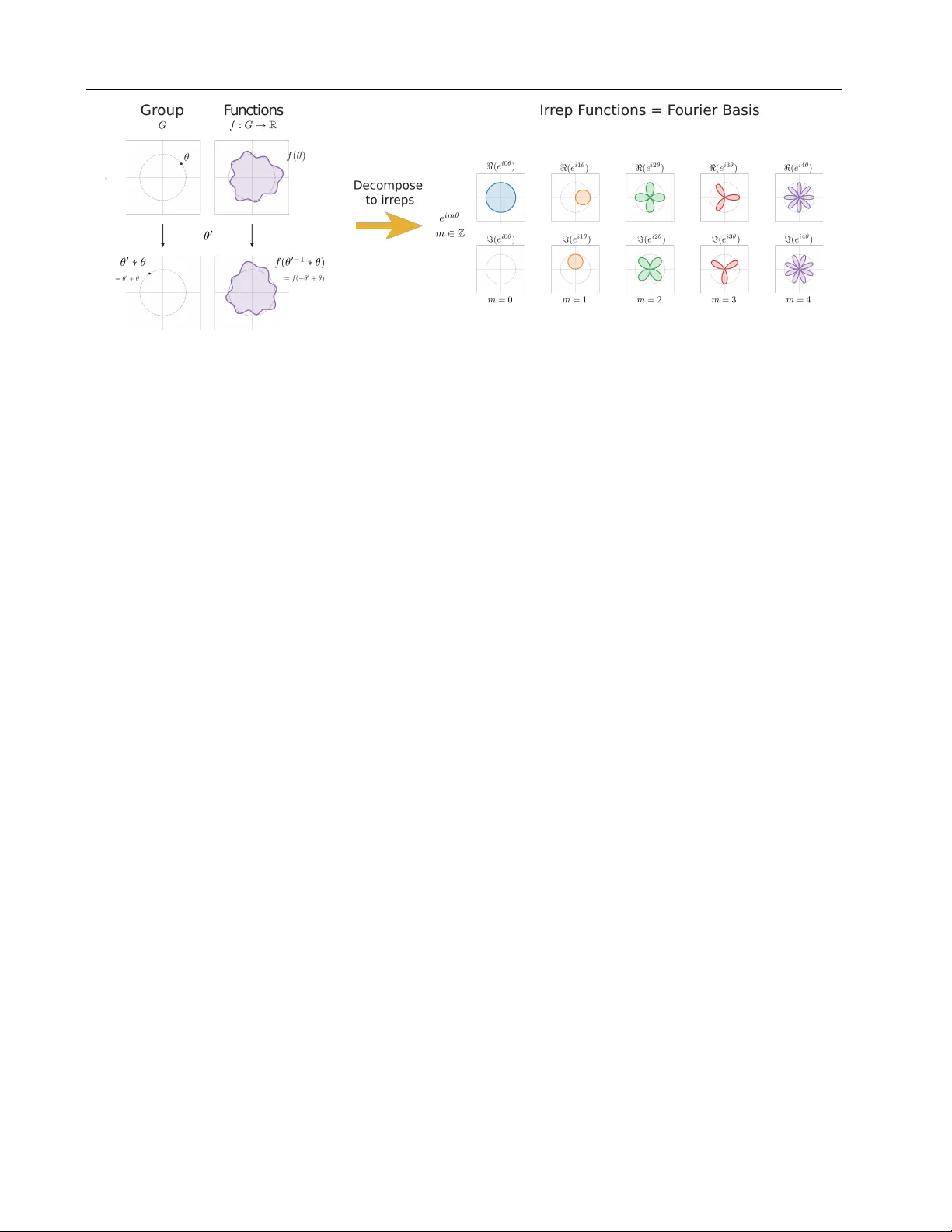
다음으로, 저자들은 그룹 푸리에 변환(GFT)과 컨볼루션 정리를 이용해 CGTP를 빠르게 계산할 수 있는 이론적 기반을 마련한다. SO(3) 위의 함수는 Wigner‑D 행렬 D^ℓ_{m,n}(g) 로 전개될 수 있으며, 두 행렬의 곱은 Clebsch‑Gordan 계수를 통해 다른 차원의 D^ℓ′ 행렬로 분해된다. 그러나 이 방식은 각 ℓ마다 2ℓ+1개의 복제(irrep multiplicity)를 갖기 때문에 샘플링 복잡도가 O(L³)으로 비효율적이다.
이를 해결하기 위해 SO(3) 를 SO(2) 로 나누어 구면 S² 로 사상한다. 오른쪽 SO(2) 회전에 대해 불변인 n=0 열을 선택하면 D^ℓ_{m,0}(g) 가 구면조화함수 Y^ℓ_m와 직접적으로 연결된다. 이 과정이 기존 가운트 텐서곱을 자연스럽게 도출한다. 하지만 스칼라 구면조화함수만으로는 ℓ₁+ℓ₂+ℓ₃이 홀수인 경우를 포함한 모든 상호작용을 표현할 수 없다는 한계가 있다.
논문은 이 한계를 극복하기 위해 텐서 구면조화함수, 특히 벡터(ℓ=1) 구면조화함수를 도입한다. 텐서 구면조화함수는 각 ℓ에 대해 다중 지표(ℓ, c)를 갖는 irrep 공간을 제공하며, 일반화된 가운트 공식은 다음과 같다.
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기