위상 신호 처리 기반 3D 포인트 클라우드 분석
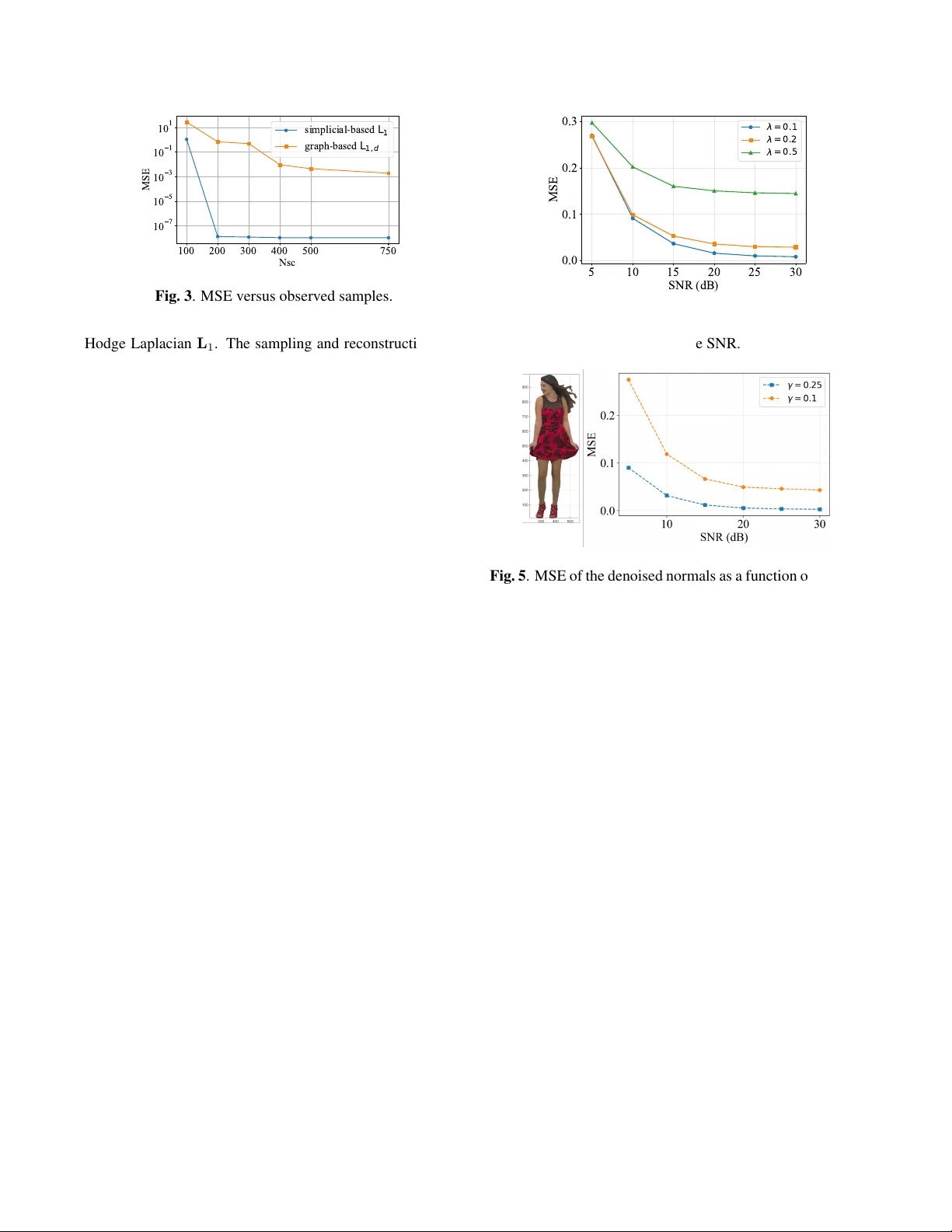
본 논문은 이산 외부 미적분(DEC)과 위트니 보간을 활용해 3차원 포인트 클라우드(PC)를 삼각형 메쉬 형태의 기하학적 심플렉스 복합체로 모델링하고, 고차 라플라시안 연산자를 정의한다. 색상(노드 벡터)과 표면 법선(삼각형 벡터)을 각각 엣지 신호와 2‑심플렉스 신호로 변환한 뒤, 위상 신호 처리(TSP) 도구를 이용해 희소 샘플링 복원과 노이즈 정제 문제를 해결한다. 실험 결과, 전통적인 그래프 기반 방법보다 샘플링 효율과 복원 정확도가 크…
저자: Tiziana Cattai, Stefania Sardellitti, Stefania Colonnese
본 논문은 3차원 포인트 클라우드(PC)를 위상 신호 처리(TSP) 프레임워크에 적용하기 위해, 먼저 포인트 클라우드에서 Delaunay 삼각분할을 수행해 정점(N), 엣지(E), 삼각형(T)으로 구성된 기하학적 심플렉스 복합체(GSC)를 만든다. 각 정점에는 색상 벡터(R,G,B)와 같은 3차원 속성을, 각 삼각형에는 표면 법선과 같은 3차원 벡터를 할당한다. 이렇게 함으로써 색상은 정점 위의 벡터 신호, 법선은 2‑심플렉스 위의 벡터 신호로 모델링된다.
DEC(Discrete Exterior Calculus) 이론을 기반으로 경계 행렬 B₁(엣지‑정점)와 B₂(삼각형‑엣지)를 정의하고, 위트니 보간 함수 φ^{(k)}를 이용해 각 차원별 내적을 나타내는 가중 행렬 M₀, M₁, M₂를 구성한다. 이를 통해 1차 라플라시안 L₁ = M₁ B₁ᵀ M₀^{-1} B₁ M₁ + B₂ M₂ B₂ᵀ 를 도출한다. L₁은 하위 인접성(엣지‑엣지)과 상위 인접성(엣지‑삼각형) 두 부분으로 나뉘며, 이는 전통적인 그래프 라플라시안이 포착하지 못하는 삼각형 간의 고차 상호작용을 수학적으로 표현한다.
색상 복원 단계에서는 정점 벡터를 엣지 스칼라 신호 s₁으로 투사한다. 구체적으로, 각 엣지 m의 양 끝점 p_{m1}, p_{m2}와 해당 정점 벡터 v(p)를 사용해 s₁ₘ = ½
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기