다중모드 이동과 형상 재구성을 위한 모듈형 마그네틱 밀리로봇 설계 및 제어
본 연구는 3 × 3 × 3 mm³ 크기의 큐브형 모듈 3종(프리, 고정, 그리퍼)을 영구자석으로 내장하고, 2차원 평면 전자기 코일(헬름홀츠·맥스웰)으로 ≤13 mT의 저강도 자기장을 생성한다. 균일장으로 토크를, 구배장으로 힘을 제공해 각각 스틱‑슬립, 플립‑워킹, 도킹 동작을 구현한다. 실시간 비전 피드백과 A* 경로 계획을 이용한 폐쇄‑루프 제어로 단일 모듈의 정확한 이동을 달성하고, 자기장 파형 조합으로 충돌 없이 체인·그리퍼·정사각형…
저자: Erik Garcia Oyono, Jialin Lin, D
본 논문은 의료·생체 환경에서 요구되는 고유동성·다기능성을 갖춘 마그네틱 밀리로봇을 구현하기 위해, 세 가지 기능을 각각 담당하는 큐브형 모듈(프리, 고정, 그리퍼)을 설계하고, 2차원 평면 전자기 코일 시스템을 이용해 저강도(≤13 mT) 자기장으로 제어하는 플랫폼을 제시한다.
1. **모듈 설계**
- 모든 모듈은 3 × 3 × 3 mm³의 정육면체 형태이며, 내부에 1 mm 구형 N40 영구자석을 삽입한다.
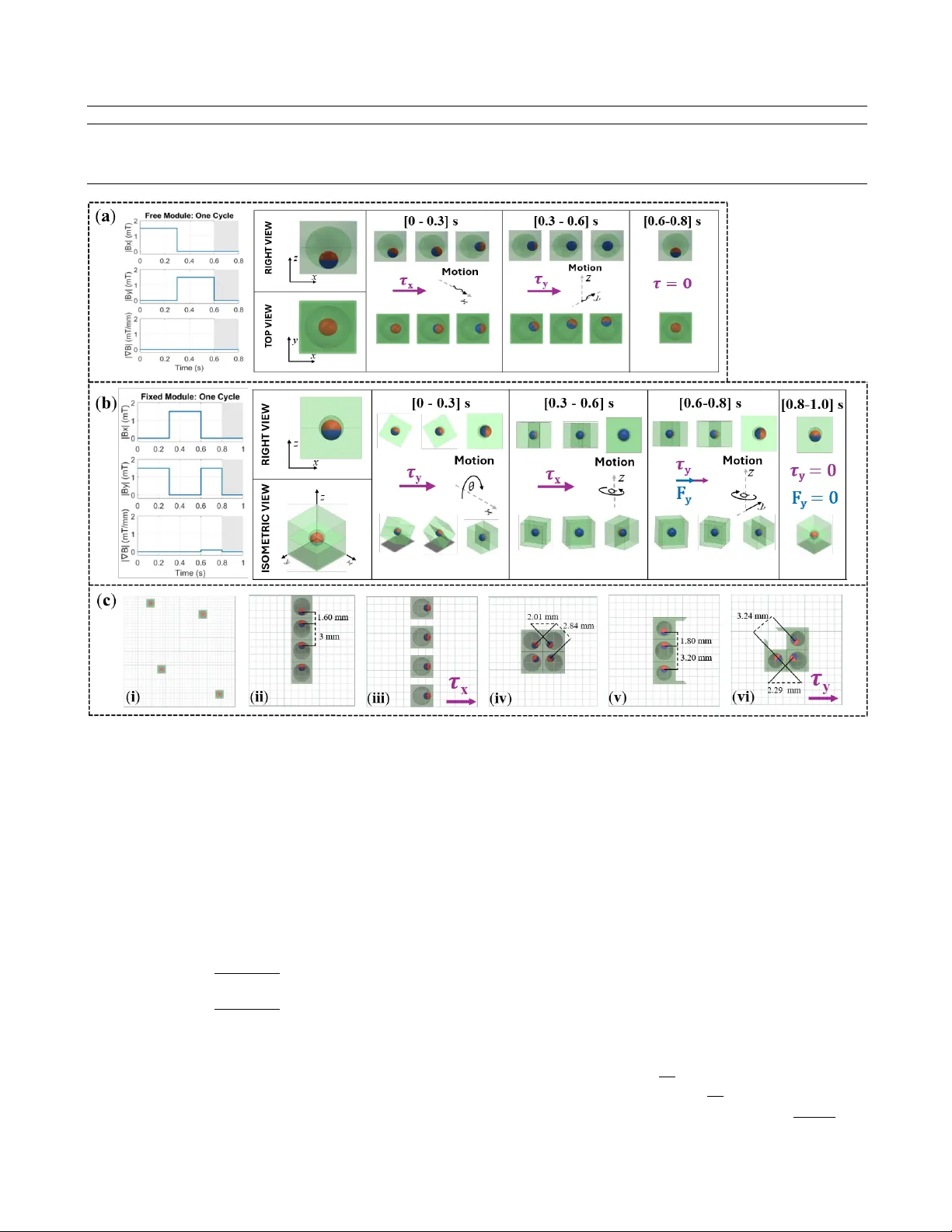
- 프리 모듈은 자석이 회전 가능한 공동을 가지고 있어 균일장 토크가 가해질 때 마찰을 이용해 스틱‑슬립 방식으로 전진한다.
- 고정 모듈은 자석을 고정시켜 전체 큐브가 회전하도록 하며, 구배장을 동시에 적용해 비대칭적인 힘을 얻어 ‘플립‑워킹’ 보행을 구현한다.
- 그리퍼 모듈은 자석 방향을 특수하게 배치해 다른 모듈과의 쌍극자 상호작용을 최적화, 체인 형성 시 안정적인 도킹과 이후의 형태 변환(그리퍼 형태) 역할을 수행한다.
2. **전기·자기 구동 시스템**
- X·Y 축에 각각 헬름홀츠(균일장)와 맥스웰(구배장) 코일 쌍을 배치한 2D 전자기 시스템을 구축하였다. 코일은 1 mm 구리선으로 감아 100~176턴을 갖고, 전류 0–1 A 구간에서 필드 강도를 선형적으로 제어한다.
- 필드 표현식 B(r)=B₀+G·r 로, B₀는 균일장, G는 구배 행렬이며, 실험실 환경에서 ∇·B≈0를 만족하도록 설계하였다.
- 전자기 시스템은 35 × 35 mm² 평면 작업공간을 제공하고, 코일 프레임과 카메라 마운트를 3D 프린팅 PLA로 제작해 전체 장비 부피와 전력 소모를 최소화하였다.
3. **제어 및 비전 시스템**
- 30 fps USB 카메라와 LED 조명을 이용해 실시간 영상 획득 후, HSV 색상 마스크와 컨투어 분석으로 모듈 및 장애물 위치를 추출한다.
- 작업공간을 이진 점유 그리드로 변환하고, 8‑연결 A* 알고리즘을 사용해 목표 지점까지 최적 경로를 생성한다.
- 경로의 각 단계는 방향에 따라 헬름홀츠 펄스(토크)와 필요 시 맥스웰 구배(힘)를 조합한 전류 명령으로 변환되는 유한 상태 기계(FSM)로 구현된다.
- 모듈이 예상 위치에 도달하지 못하면 전류를 0.1 A씩 증가시켜 필드 강도를 보강하고, 최대 시도 횟수를 초과하면 동작을 중단한다.
4. **실험 결과**
- **단일 모듈 이동성**: 프리·고정 모듈 모두 1.5 mT 이하의 균일장으로 10 사이클당 평균 0.8 mm 전진을 달성, 기존 연구에서 요구되던 체인 기반 이동을 대체한다.
- **다중모드 재구성**: 자기장 파형을 순차적으로 적용해(1) 체인 형성, (2) 체인→그리퍼 변환, (3) 체인→정사각형 변환, (4) 분해를 수행하였다. 체인→그리퍼 변환 성공률은 90 %였으며, 정사각형 변환은 모듈 기하학적 제약으로 성공률이 낮았다(≈55 %).
- **폐쇄‑루프 내비게이션**: 미로 형태의 장애물 구역에서 고정 모듈을 목표 지점까지 이동시켰으며, 평균 12 초 내에 목표 도달, 경로 재계산 및 필드 강도 보정이 실시간으로 작동함을 확인하였다.
5. **비교 및 기여**
- 기존 3D 전자기 시스템(40 mT, 100 × 100 mm²)과 비교해, 본 연구는 2D 코일로 13 mT 이하의 저강도 필드만으로도 단일 모듈 제어와 충돌‑프리 재구성을 구현한다.
- 표 Ⅰ에서 제시된 바와 같이, 충돌 없는 재구성, 단일 모듈 제어, 폐쇄‑루프 경로 계획을 모두 만족하는 최초의 시스템이다.
6. **제한점 및 향후 과제**
- 현재는 2D 평면에서만 동작하므로 3D 복합 환경으로 확장하려면 코일 배열 및 전장 모델링이 필요하다.
- 비전 기반 추적은 투명 조직이나 혈류와 같은 복잡한 생체 매체에서 정확도가 떨어질 수 있어, 초음파·광학 융합 센서 개발이 요구된다.
- 13 mT 이하의 필드 강도는 무게가 큰 화물 운반이나 고속 이동에 제한적이므로, 고출력 저전력 코일 설계와 효율적인 전력 관리 기술이 필요하다.
결론적으로, 이 논문은 저전력·소형 전자기 구동, 모듈별 맞춤형 자기 설계, 실시간 비전 피드백을 결합해 ‘단일 모듈 독립 제어와 충돌‑프리 재구성’을 최초로 구현함으로써, 의료·생체 응용을 위한 적응형 마그네틱 밀리로봇 개발에 중요한 기반을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기