Transformer 기반 mmWave 다중 목표 추적 및 손실 목표 재획득 프레임워크
본 논문은 대규모 안테나를 보유하지만 RF 체인이 제한된 6G mmWave ISAC 시스템에서, 펜슬형 좁은 빔으로 다중 목표를 지속적으로 추적할 때 발생하는 ‘추적 손실’ 문제를 해결하기 위해 두 가지 동작 모드(N‑Mode, R‑Mode)를 갖는 Transformer 기반 트래킹 프레임워크인 m³TrackFormer를 제안한다. N‑Mode에서는 Encoder 기반 Normal Tracking Network(N‑Net)으로 현재 목표들의 위…
저자: Tongkai Li, Weifeng Zhu, Shuowen Zhang
본 연구는 6G 시대에 도입될 mmWave 통합 감지·통신(ISAC) 시스템을 전제로 한다. BS는 수천 개에 달하는 안테나 배열을 갖지만, 비용 및 전력 제약으로 RF 체인은 소수에 불과하다. 이로 인해 빔포밍은 펜슬형 좁은 빔을 선택적으로 전송하는 방식으로 구현되며, 각 빔이 목표를 정확히 가리키지 못하면 ‘추적 손실’이 발생한다. 기존의 Kalman Filter 기반 예측은 모델 오차와 측정 잡음에 취약하고, 전통적인 전역 빔 스위핑은 시간·자원 소모가 크다.
이에 저자들은 두 가지 동작 모드를 갖는 Transformer 기반 프레임워크 m³TrackFormer를 설계하였다. 시스템은 매 타임 블록을 ‘트래킹 단계’와 ‘통신 단계’로 나누고, 트래킹 단계에서 K개의 OFDM 심볼 동안 Bₛ = K·N_RF_T 개의 빔을 전송한다. 빔 선택은 사전 정의된 코드북에서 이루어지며, 각 빔은 특정 방위·고도 각을 가리킨다.
**Normal Tracking Mode (N‑Mode)**
모든 목표가 현재 빔에 포착된 경우, 프레임워크는 N‑Net을 활성화한다. N‑Net은 Transformer Encoder를 핵심으로 하며, 입력으로는 각 목표의 과거 위치(또는 관측된 거리·방위·고도) 시퀀스를 사용한다. Self‑Attention을 통해 전역적인 시간‑공간 상관관계를 학습하고, 이를 바탕으로 현재 위치 추정과 다음 블록에 사용할 빔 방향을 예측한다. Beam Prediction Head는 예측된 각을 코드북 인덱스로 매핑해 빔 스위핑을 최소화한다.
**Re‑Acquisition Mode (R‑Mode)**
일부 목표가 빔 미스얼라인먼트로 인해 측정이 누락되면, 시스템은 즉시 R‑Mode로 전환한다. R‑Net은 Transformer Decoder 구조이며, Encoder에서 얻은 전체 궤적 컨텍스트와 현재 빔 배치 정보를 Cross‑Attention으로 결합한다. 손실 목표에 대한 ‘부정적 피드백’(빔이 목표를 지나친 기록)과 정상 목표에 대한 ‘긍정적 피드백’(정확한 궤적) 모두를 입력으로 사용해 손실 목표의 잠재 위치를 추정한다. 이후 최소한의 추가 빔(예: 2~3개)만을 스위핑하여 목표를 재획득한다. 이 과정은 데이터 임퓨테이션 없이도 전역 컨텍스트만으로 가능하므로, 추적 손실이 반복되는 고이동성 상황에서도 빠른 복구가 가능하다.
**다중 목표 확장 (m³TrackFormer)**
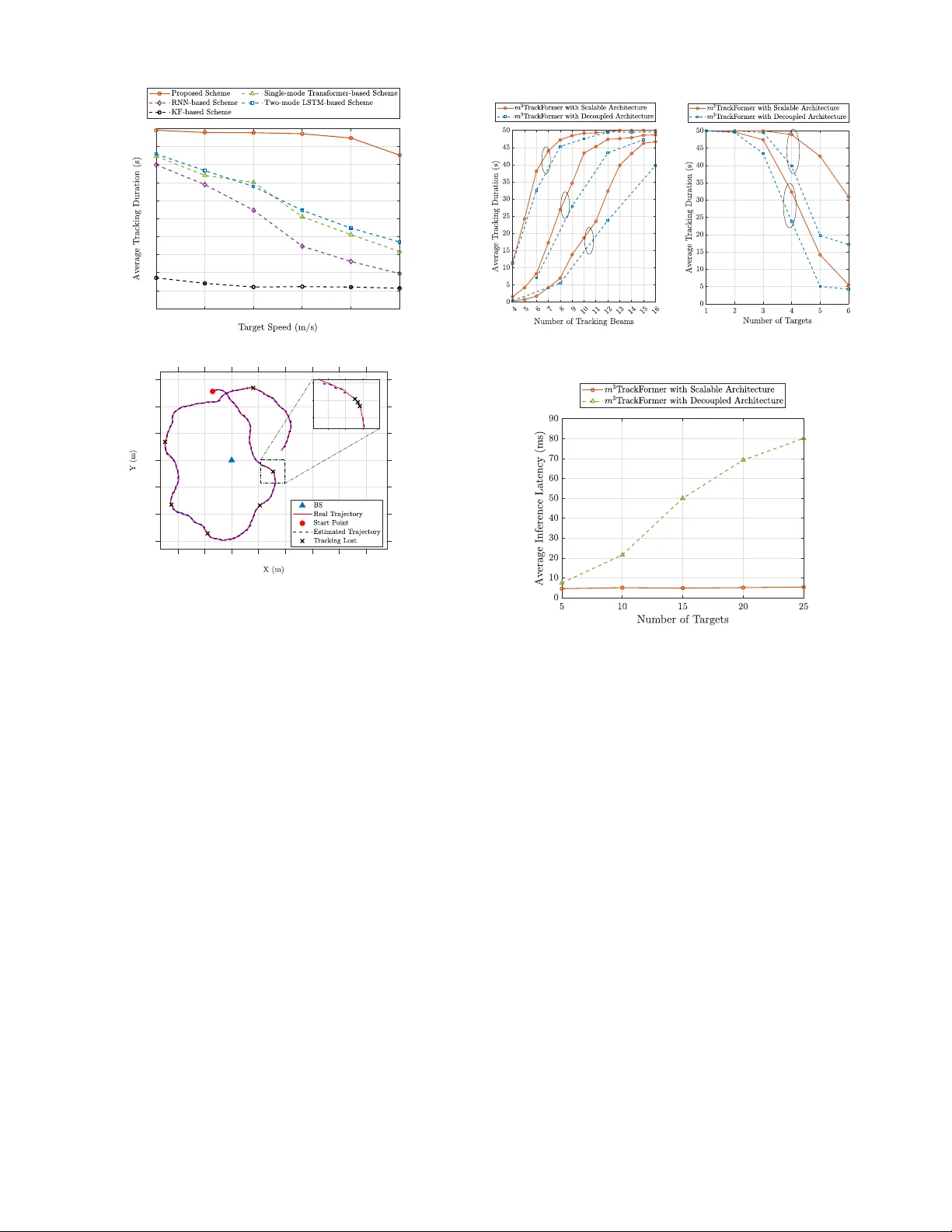
단일 목표 구조인 m²TrackFormer를 기반으로, 다중 목표 시나리오에서는 각 목표마다 독립적인 Motion Feature Extraction 모듈을 병렬 실행한다. 추출된 피처는 Aggregation Layer에서 합쳐져 공동 빔 스위핑 전략을 생성한다. 이 설계는 목표 수 I가 증가해도 연산 복잡도가 O(I) 수준으로 유지되며, 실시간 요구사항을 만족한다.
**실험 및 성능 평가**
시뮬레이션은 저이동성(속도 ≤ 5 m/s)과 고이동성(속도 ≤ 30 m/s) 두 환경에서 수행되었다. 비교 대상은 전통적인 Kalman Filter, LSTM 기반 트래킹, 그리고 Exhaustive Beam Sweeping이다. 주요 지표는 ‘추적 성공 확률(Tracking Success Probability)’과 ‘추적 지속 시간(Tracking Duration)’이다. 결과는 다음과 같다.
- 저이동성: m³TrackFormer는 평균 추적 지속 시간이 기존 KF 대비 15% 증가, LSTM 대비 22% 증가.
- 고이동성: 추적 지속 시간이 KF 대비 130% 이상, LSTM 대비 85% 향상. 특히, 손실 목표가 발생한 후 평균 2.3개의 추가 빔만으로 재획득에 성공, 전통적인 전역 스위핑 대비 70% 이상의 시간 절감.
- 추론 지연: 목표 수 1~8개에 대해 평균 1.8 ms 이하, GPU 기반 실시간 처리 가능.
**시사점 및 한계**
본 연구는 Transformer의 전역 시계열 모델링 능력을 mmWave 빔 트래킹에 적용함으로써, 복잡한 비선형 궤적과 급격한 방향 전환을 효과적으로 다룰 수 있음을 입증한다. R‑Mode의 Cross‑Attention 기반 재획득 메커니즘은 기존 데이터 임퓨테이션 방식보다 정확도가 높으며, 빔 스위핑 오버헤드를 최소화한다. 다만, 현재는 시뮬레이션 기반 평가에 머물러 실제 하드웨어 구현 시 RF 체인 비선형성, 채널 잡음, 다중 경로 효과 등에 대한 추가 검증이 필요하다. 또한, 코드북 설계와 빔 수 최적화가 시스템 전반의 성능에 큰 영향을 미치므로, 향후 연구에서는 적응형 코드북 및 빔 설계와 결합한 end‑to‑end 학습이 요구된다.
결론적으로, m³TrackFormer는 6G mmWave ISAC 시스템에서 다중 목표를 안정적으로 추적하고, 손실 상황에서도 최소 자원으로 빠르게 복구할 수 있는 실용적인 솔루션을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기