포트해밀토니안 기반 구조적 시간 동역학 예측 모델 PHAST
PHAST는 위치 정보만으로 관측되는 물리 시스템의 장기 예측과 물리 파라미터 복원을 목표로, 포트‑해밀토니안 구조를 이용해 보존‑소산을 명시적으로 분리하고, 저‑랭크 양정(PSD/SPD) 파라미터화와 Strang 분할 적분으로 안정성을 보장한다. 세 가지 지식 레짐(KNOWN, PARTIAL, UNKNOWN)에서 잠재적인 질량·포텐셜·감쇠를 학습하거나 고정함으로써, 장기 롤아웃 정확도와 물리적 식별 가능성을 동시에 달성한다.
저자: Shubham Bhardwaj, Ch, rajit Bajaj
본 논문은 실제 물리 시스템이 대부분 에너지를 소산한다는 점에 착안해, 위치 정보만으로 관측되는 “q‑only” 상황에서 장기 동역학 예측과 물리 파라미터 복원을 동시에 달성할 수 있는 새로운 딥러닝 프레임워크 PHAST(Port‑Hamiltonian Architecture for Structured Temporal dynamics)를 제안한다.
1. **문제 정의 및 배경**
- 물리 시스템은 보존‑소산 구조를 갖으며, 이를 포트‑해밀토니안 형태 \(\dot{x}=(J-R)\nabla H(x)\)로 표현할 수 있다. 여기서 \(J\)는 반대칭 보존 연산자, \(R\succeq0\)는 소산 연산자이다.
- 기존 물리‑인포드 네트워크(HNN, LNN)는 보존 시스템에만 초점을 맞추어 소산을 다루지 못하고, 최신 시계열 모델(S5, LinOSS 등)은 물리적 보증이 부족하다.
- 또한, 위치만 주어지고 모멘텀은 잠재 상태인 경우, 관측된 궤적만으로는 질량·포텐셜·감쇠 파라미터가 고유하게 결정되지 않는 “게이지 자유도” 문제가 존재한다.
2. **PHAST의 핵심 설계**
- **포트‑해밀토니안 템플릿**: Hamiltonian을 \(H(q,p)=V(q)+\frac12 p^\top M(q)^{-1}p\) 로 분해하고, 감쇠 텐서 \(D(q)\)를 \(R\)의 하위 블록으로 배치한다. 이는 \(\dot H=-\nabla H^\top R \nabla H\le0\) 를 보장한다.
- **지식 레짐**:
* **KNOWN** – \(V\)와 \(M\)을 사전 제공, \(D\)만 학습.
* **PARTIAL** – \(V\) 혹은 \(M\) 중 하나만 제공, 나머지와 \(D\)를 학습.
* **UNKNOWN** – 모든 구성요소를 신경망으로 학습.
- **저‑랭크 양정 파라미터화**: \(M(q)=\sum_{i=1}^r a_i(q)a_i(q)^\top+\epsilon I\), \(D(q)=\sum_{j=1}^s b_j(q)b_j(q)^\top\) 형태로 외적 전개하여 양정성을 구조적으로 보장하고 연산 비용을 \(O(nr)\) 수준으로 낮춘다.
- **시간 적분**: Strang splitting을 적용해 보존 흐름과 소산 흐름을 각각 정확히 풀고 순서를 뒤바꾸어 2차 정확도와 구조 보존(에너지 감소) 특성을 유지한다.
3. **학습 파이프라인**
- **속도 관측기**: 과거 위치 시퀀스를 입력해 \(\hat{\dot q}\)를 추정하는 causal observer(예: 1‑D CNN 또는 RNN).
- **Canonicalizer**: \(\hat p = M(q)\hat{\dot q}\) 로 변환해 포트‑해밀토니안 상태 \((q,\hat p)\)를 만든다.
- **포트‑해밀토니안 코어**: 위에서 정의한 \(V,M,D\)와 Strang splitting을 이용해 연속‑시간 흐름을 시뮬레이션하고, 오픈‑루프 롤아웃을 수행한다.
- 손실 함수는 위치 롤아웃 MSE와, PARTIAL/KNOWN 레짐에서는 물리 파라미터 정규화(예: \(D\)의 L2) 를 결합한다.
4. **실험 및 결과**
- **벤치마크**: 13개의 q‑only 시스템(진자, 이중 진자, 카트‑폴, 로봇 팔, N‑body, RLC 회로, Lennard‑Jones 클러스터, 열 교환, 포식‑피식 등)과 각각의 보존·소산 변형을 포함.
- **비교 모델**: S5, LinOSS, D‑LinOSS, VPT 등 최신 시계열/동역학 모델.
- **성과**:
* 장기 롤아웃 MSE(H=100)에서 PHAST가 모든 베이스라인을 크게 앞섰다. 예: 진자에서 0.064 vs. 0.954(S5).
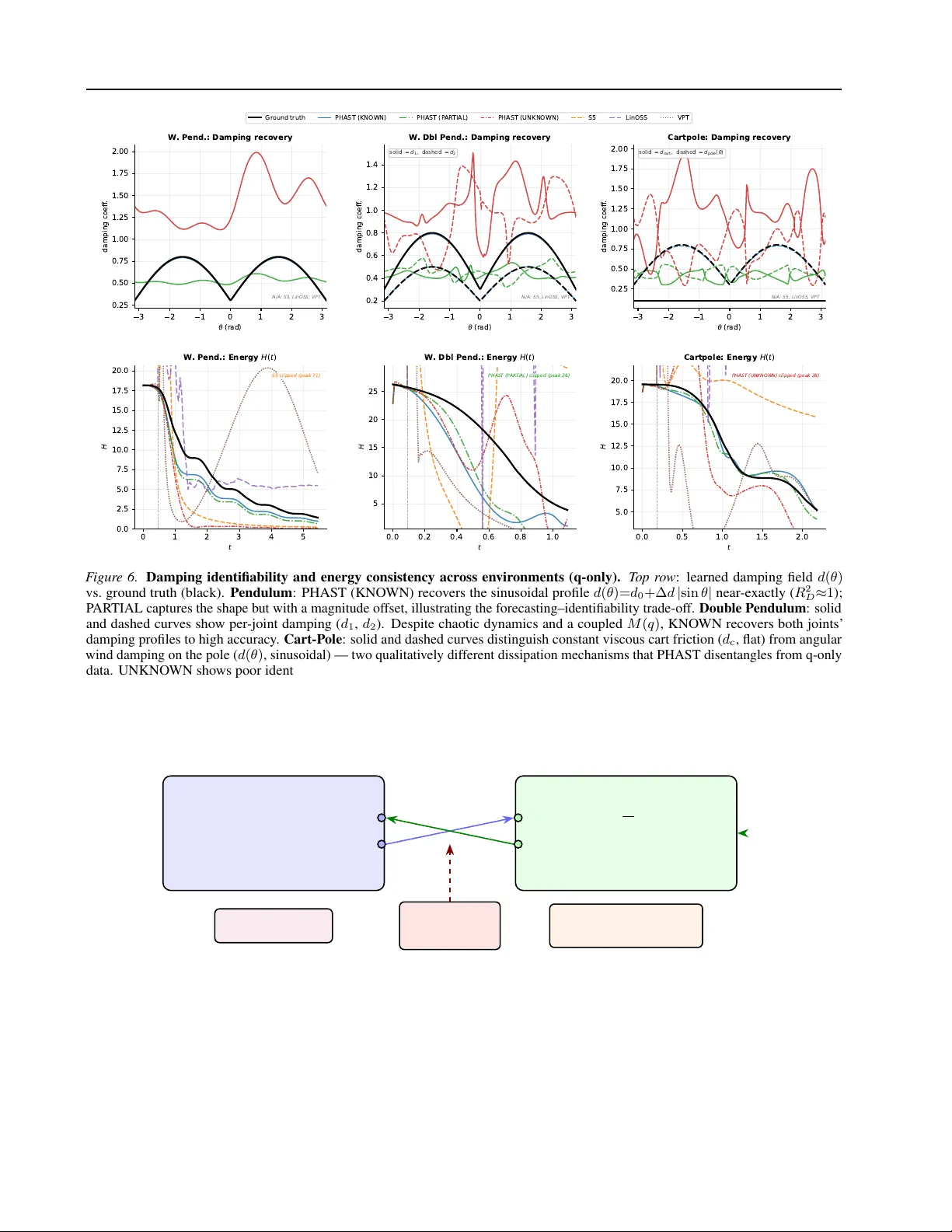
* KNOWN 레짐에서는 실제 감쇠 필드 \(D(q)\)를 거의 완벽히 복원(R²≈1). PARTIAL 레짐에서도 높은 예측 정확도와 함께 부분적인 파라미터 식별이 가능했다.
* UNKNOWN 레짐은 예측 안정성은 유지하지만 파라미터 식별이 불가능함을 확인, 이는 “두 축 평가”(forecasting stability vs. identifiability) 개념을 통해 명확히 드러났다.
- **감쇠 제한 효과**: \(D\)에 상한을 두면 학습된 감쇠가 실제 물리적 감쇠와 더 가까워지며, 과도한 소산이 모델 오류를 숨기는 현상을 방지한다.
5. **이론적 분석**
- Appendix A.4에서 선형화된 시스템 \(\dot x=(J-R)Qx\)의 고유값이 왼쪽 반평면에 위치함을 증명, 이는 구조적 안정성의 근거가 된다.
- 저‑랭크 파라미터화와 Woodbury 정리를 이용한 \(M^{-1}\) 연산 복잡도 분석을 통해 대규모 시스템에서도 실시간 시뮬레이션이 가능함을 보였다.
- 게이지 자유도에 대한 논의(H.8)에서는 \(V\)와 \(M\) 중 하나를 고정하지 않으면 무한히 많은 파라미터 조합이 동일 궤적을 생성함을 수학적으로 증명한다.
6. **한계 및 향후 연구**
- 현재는 외부 입력 \(u\)가 없는 자유 시스템에 초점을 맞추었으며, 포트‑해밀토니안 제어(에너지‑Casimir)와 같은 유도 입력 상황은 향후 연구로 남겨졌다.
- 질량 텐서 \(M(q)\)를 완전한 구성 의존 형태로 학습하는 경우 연산 비용이 증가하므로, 효율적인 저‑랭크 근사와 스파스 구조 탐색이 필요하다.
- 비선형 감쇠(예: 스위치형 마찰)와 다중 포트(다중 입출력) 시스템에 대한 확장도 기대된다.
**결론**
PHAST는 포트‑해밀토니안 구조를 딥러닝에 통합함으로써, 물리적 보존·소산 특성을 수치적으로 보장하고, 제한된 물리 지식(포텐셜·질량)만으로도 파라미터 식별이 가능한 프레임워크를 제공한다. 실험 결과는 구조적 물리 지식이 장기 예측 안정성과 파라미터 복원 양쪽에서 큰 이점을 제공한다는 것을 입증한다. 향후 다양한 분야(로보틱스, 전력 시스템, 생태 모델 등)에서 PHAST를 활용한 그레이‑박스 모델링이 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기