자율 및 비자율 고정시간 리더‑팔로워 합의 제어
본 논문은 이중 적분기 동역학을 갖는 다중 에이전트 시스템에서, 일부 팔로워만 리더의 상태를 직접 관측할 수 있는 상황에서 고정시간 수렴을 보장하는 리더‑팔로워 합의 추적 문제를 다룬다. 두 단계로 구성된 제어 체계—분산 관측기와 추적 제어기—를 제시하고, 고정시간 수렴을 보장하는 자율형(시간 불변) 프로토콜과 비자율형(시간 가변 이득) 프로토콜을 설계·비교한다. 비자율형은 상한 수렴 시간(UBST)의 보수성을 낮추면서도 이득이 유계임을 보장한…
저자: Miguel A. Trujillo, Rodrigo Aldana-López, David Gomez Gutierrez
본 논문은 이중 적분기(두 차원) 동역학을 갖는 다중 에이전트 시스템(MAS)에서 리더‑팔로워 합의 문제를 고정시간(fixed‑time) 수렴 관점에서 재조명한다. 기존 연구들은 보통 지수 수렴이나 유한 시간 수렴을 목표로 했지만, 고정시간 수렴은 수렴 시간이 초기 조건에 무관하게 사전에 지정된 상한값 이하임을 보장한다는 점에서 실시간 제어와 안전-critical 시스템에 특히 유용하다. 그러나 고정시간 합의를 달성하기 위해서는 관측기와 제어기 모두에 특수한 비선형 구조가 필요하며, 특히 일부 팔로워만 리더의 상태를 직접 측정할 수 있는 제한된 정보 구조에서는 분산 관측기의 설계가 핵심 과제가 된다.
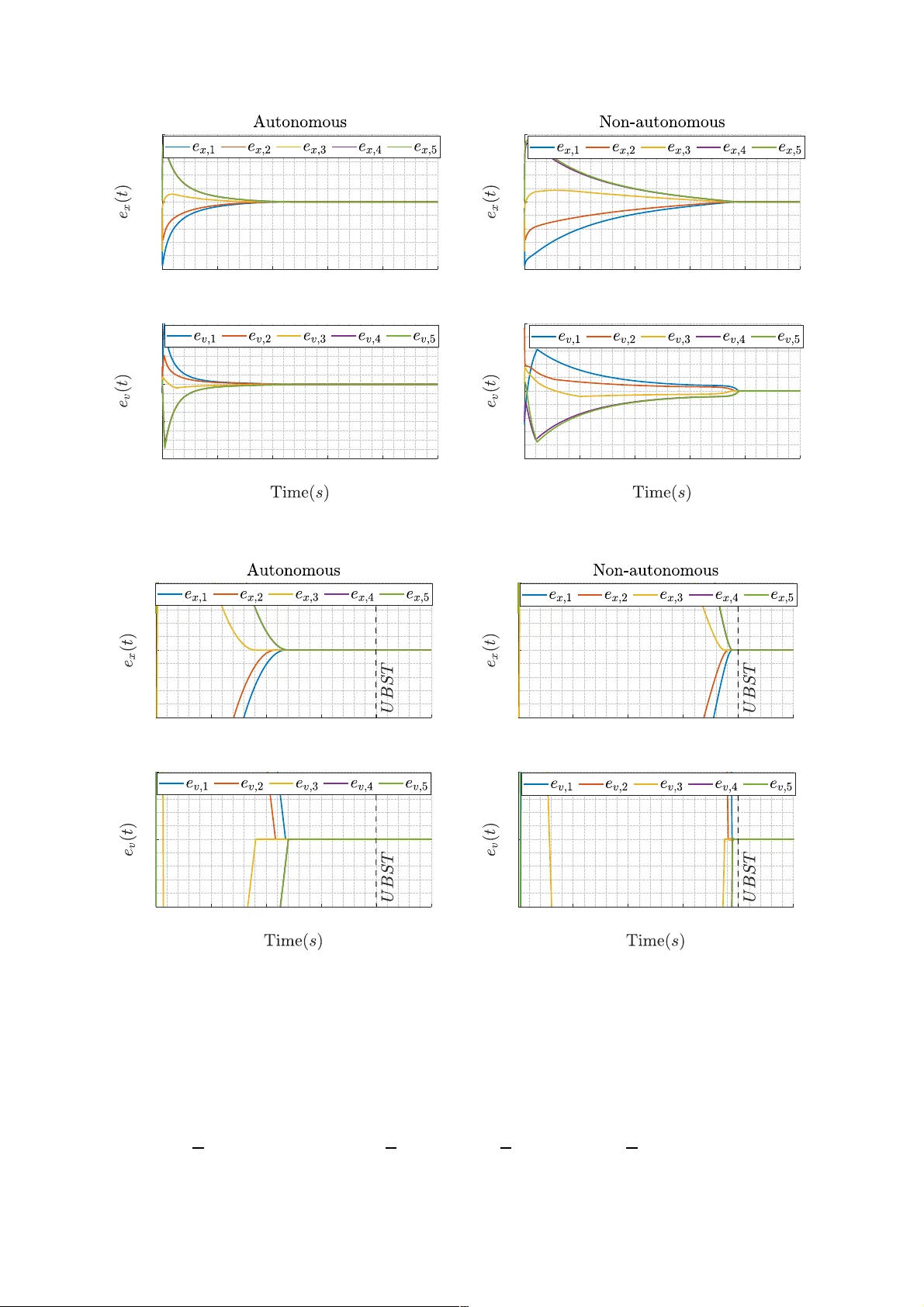
논문은 이러한 문제를 해결하기 위해 두 단계의 제어 프레임워크를 제시한다. 첫 번째 단계는 **분산 고정시간 관측기**이다. 각 팔로워 \(i\)는 인접 이웃 \(j\)와 교환하는 정보 \(\{x_j, v_j\}\)와, 직접 리더와 연결된 경우 리더의 상태 \((x_L, v_L)\)를 이용해, 자체적인 추정 \((\hat{x}_{i}, \hat{v}_{i})\)를 업데이트한다. 관측기 설계는 라플라시안 행렬 \(L\)와 비선형 항 \(\phi(e)=|e|^{\alpha}\operatorname{sgn}(e)+|e|^{\beta}\operatorname{sgn}(e)\) (\(0<\alpha<1<\beta\)) 를 결합한 형태이며, 이를 통해 오차 \(e_i =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기