실시간 다운홀 케이싱 콜라 인식용 경량 신경망 시스템
본 논문은 다운홀 기구에 탑재 가능한 ARM Cortex‑M7 마이크로컨트롤러용 초소형 신경망인 Collar Recognition Net(CRN) 시리즈를 제안한다. 시간‑합성곱과 depthwise separable convolution을 결합해 8,208 MAC만으로도 F1 = 0.972의 높은 인식 성능을 달성했으며, 실제 하드웨어에서 평균 343 µs의 추론 지연을 기록한다.
저자: Si-Yu Xiao, Xin-Di Zhao, Xiang-Zhan Wang
**1. 연구 배경 및 필요성**
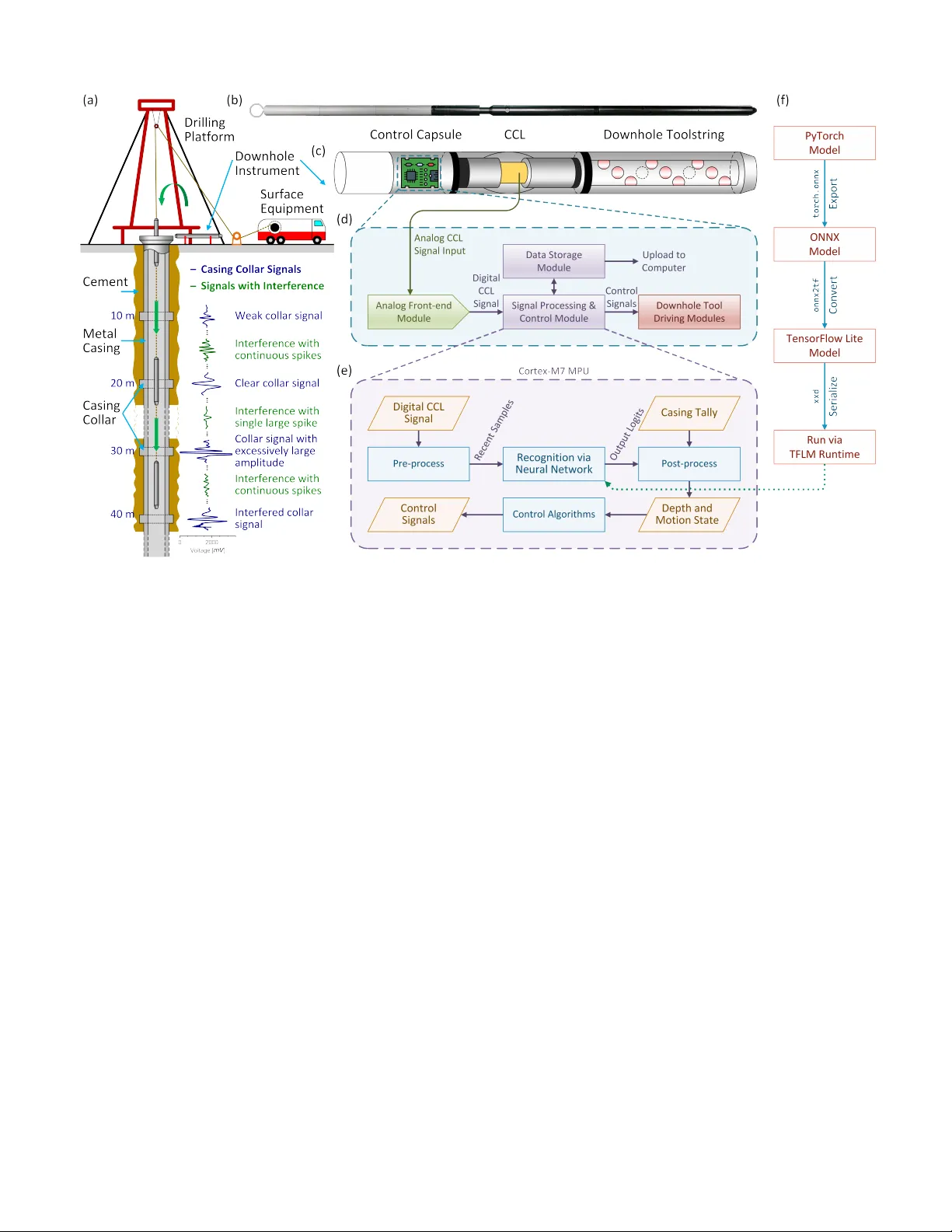
석유·가스 시추 과정에서 다운홀 기구의 정확한 위치 파악은 생산 효율과 안전성에 직결한다. 기존의 케이싱 콜라 로케이터(CCL)는 마그네틱 센서를 이용해 케이싱 콜라가 지나갈 때 발생하는 전압 펄스를 감지하고, 이를 지표면으로 전송해 후처리한다. 그러나 1 km 이상 길이의 와이어라인을 통해 전송되는 신호는 외부 자기장, 도구 자체의 금속 구조, 그리고 전송 거리로 인한 감쇠·노이즈에 크게 영향을 받아 실시간 인식이 어려워진다. 특히 펌프‑다운 퍼포레이션(PDP)이나 플러그‑앤‑퍼프(P&P)와 같은 실시간 제어가 요구되는 작업에서는 지표면에서의 후처리가 비현실적이다. 따라서 제한된 전력·공간을 가진 다운홀 기구 내부에 직접 신호 처리 로직을 탑재하는 것이 필요하다.
**2. 시스템 아키텍처**
제안된 시스템은 크게 네 부분으로 구성된다. (1) 아날로그 프론트엔드(AFE)와 16‑bit ADC가 1 kHz로 CCL 신호를 디지털화한다. (2) MCU(ARM Cortex‑M7) 내부에서 160 샘플(160 ms) 길이의 슬라이딩 윈도우를 정규화하고, 평균 0·표준편차 1인 정규분포 형태로 변환한다. (3) 정규화된 시계열을 신경망에 입력해 콜라 신호 존재 확률을 출력한다. (4) 확률이 사전 정의된 임계값을 초과하고 일정 시간 지속될 경우, 시간 중심을 계산해 해당 콜라의 깊이를 케이싱 탤리와 매핑하고, 이를 기반으로 다운홀 도구의 이동 상태를 추정한다. 전체 파이프라인은 1 ms 주기 내에 완료된다.
**3. 신경망 설계**
경량화를 위해 MobileNet‑style 구조와 Temporal Convolutional Network(TCN) 개념을 결합하였다. 기본 블록은 1‑D convolution → 배치 정규화 → ReLU → Spatial Dropout 순으로 이루어지며, 마지막에는 Fully Connected → Sigmoid 로 확률을 산출한다. 세 가지 변형 모델을 제안하였다.
- **CRN‑1**: 전통적인 2‑D convolution 사용, 파라미터 4,305개, MAC 45,584개. 최고 F1 = 0.992.
- **CRN‑2**: depthwise separable convolution 적용, 파라미터 2,497개, MAC 22,544개. F1 = 0.988.
- **CRN‑3**: 입력에 1‑D 풀링 레이어를 추가해 연산량을 8,208 MAC로 감소, 파라미터 1,985개, F1 = 0.972.
모델 입력은 160 포인트 시계열이며, 출력은 콜라 존재 확률(logit)이다.
**4. 학습 및 데이터 증강**
현장 CCL 파형을 라벨링한 데이터셋을 사용했으며, 라벨은 콜라 중심을 기준으로 가우시안 형태의 연속 확률 맵으로 변환하였다. 손실 함수는 Binary Cross‑Entropy이며, Adam 옵티마이저로 학습한다. 데이터 증강으로는 라벨 스무딩(LDS), 라벨 스무딩 정규화(LSR), 랜덤 크롭, 시간 스케일링, 다중 샘플링을 적용해 모델의 일반화 능력을 강화하였다.
**5. MCU 배포**
TensorFlow Lite for Microcontrollers(TFLM)를 이용해 모델을 .tflite 형식에서 MCU 전용 바이너리로 변환하였다. Cortex‑M7은 550 MHz, FPU와 SIMD 지원으로 약 70 MFLOPS의 처리량을 제공한다. CRN‑3 모델은 평균 343 µs의 추론 시간을 기록했으며, 이는 1 ms 샘플링 주기와 충분히 맞물려 실시간 처리가 가능함을 의미한다.
**6. 실험 결과 및 비교**
표 1에 제시된 바와 같이, CRN‑3는 기존 연구(Thin AlexNet, Mini‑AlexNet, CNN‑LSTM 등) 대비 파라미터와 MAC가 수천 배에서 수십 배 감소했음에도 불구하고 F1 = 0.972로 경쟁력 있는 성능을 보였다. 특히, CRN‑1은 F1 = 0.992로 최고 정확도를 기록했지만, 연산량이 45 k MAC로 MCU 실시간 구동에 한계가 있다. CRN‑3는 8 k MAC 수준에서 0.972의 F1을 달성해 전력·열 관리 측면에서 가장 실용적이다.
**7. 논의 및 한계**
- **트레이드오프**: 모델 용량을 줄이면 확률 맵이 이상적인 형태와 차이가 커져 경계 검출이 다소 불안정해진다. 이는 실시간 제어 시 오탐·누락 위험을 증가시킬 수 있다.
- **데이터 다양성**: 현장 데이터가 제한적이어서 다양한 지질·케이싱 환경에서의 일반화 검증이 필요하다.
- **환경 적응**: 고온·고압 환경에서 MCU의 전력 소모와 열 방출을 장기적으로 평가해야 한다.
- **확장 가능성**: 다중 센서(예: 진동, 압력)와 결합하거나, 임계값을 어댑티브하게 조정하는 알고리즘을 추가하면 더욱 견고한 위치 추정이 가능할 것이다.
**8. 결론**
본 연구는 다운홀 기구에 탑재 가능한 초소형 신경망을 설계·학습·배포하는 전 과정을 제시함으로써, 제한된 리소스 환경에서도 실시간 케이싱 콜라 인식이 가능함을 입증하였다. 특히 CRN‑3는 8 k MAC, 2 k 파라미터 수준에서 0.972의 F1 점수를 달성해, 기존 수백만 MAC 수준 모델을 대체할 수 있는 실용적인 솔루션으로 평가된다. 향후 다양한 현장 데이터와 환경 조건을 반영한 모델 확장 및 하드웨어 최적화가 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기