거리와 면적을 이용한 n개의 평면 에이전트 형성 제어
본 논문은 2차원 평면에서 n개의 단일 적분기 에이전트가 방향성 그래프를 따라 움직일 때, 거리와 삼각형의 부호 면적을 동시에 제어함으로써 원하는 형성으로 거의 전역적인 수렴을 보장하는 제어법을 제시한다. 삼각형으로 구성된 최소 지속 그래프(LFF)와 특정 에지 길이 조건을 만족하면, 초기 조건에 크게 구애받지 않고 올바른 형성(반사·뒤집힘이 없는)으로 수렴한다.
저자: Tairan Liu, Marcio de Queiroz, Pengpeng Zhang
**1. 서론**
다중 에이전트 형성 제어는 로봇 군집, 무인 항공기, 센서 네트워크 등에서 핵심 기술이다. 기존 방법은 (i) 절대 위치를 이용한 상대 위치 제어와 (ii) 거리 기반 제어로 나뉜다. 전자는 전역 좌표계 동기화가 필요해 실용성이 떨어지고, 후자는 로컬 좌표계만으로 구현 가능하지만 거리 제약만으로는 형성의 회전·반사 자유도가 남아 ‘플립’ 형태에 수렴할 위험이 있다. 강체 이론을 적용해 최소 강체 그래프를 사용하면 이러한 자유도를 제한할 수 있지만, 여전히 동형이지만 비동형인 해가 존재한다.
**2. 배경 이론**
- **무방향 그래프와 강체성**: 프레임워크 \((G,p)\) 의 거리 함수 \(\gamma(p)\)와 리지디티 매트릭스 \(R(p)\) 를 정의하고, 무한소 강체성은 \(\operatorname{rank}R=2n-3\) 로 표현한다. 최소 강체 그래프는 에지 수가 \(2n-3\) 인 경우이다.
- **방향성 그래프와 지속성**: 방향성 그래프는 제어 흐름을 정의한다. 지속성은 (i) 각 노드의 출력 차수가 2 이하, (ii) 기본 무방향 그래프가 강체인 경우에 만족한다. 최소 지속 그래프는 Henneberg type‑I 삽입을 통해 구성된다.
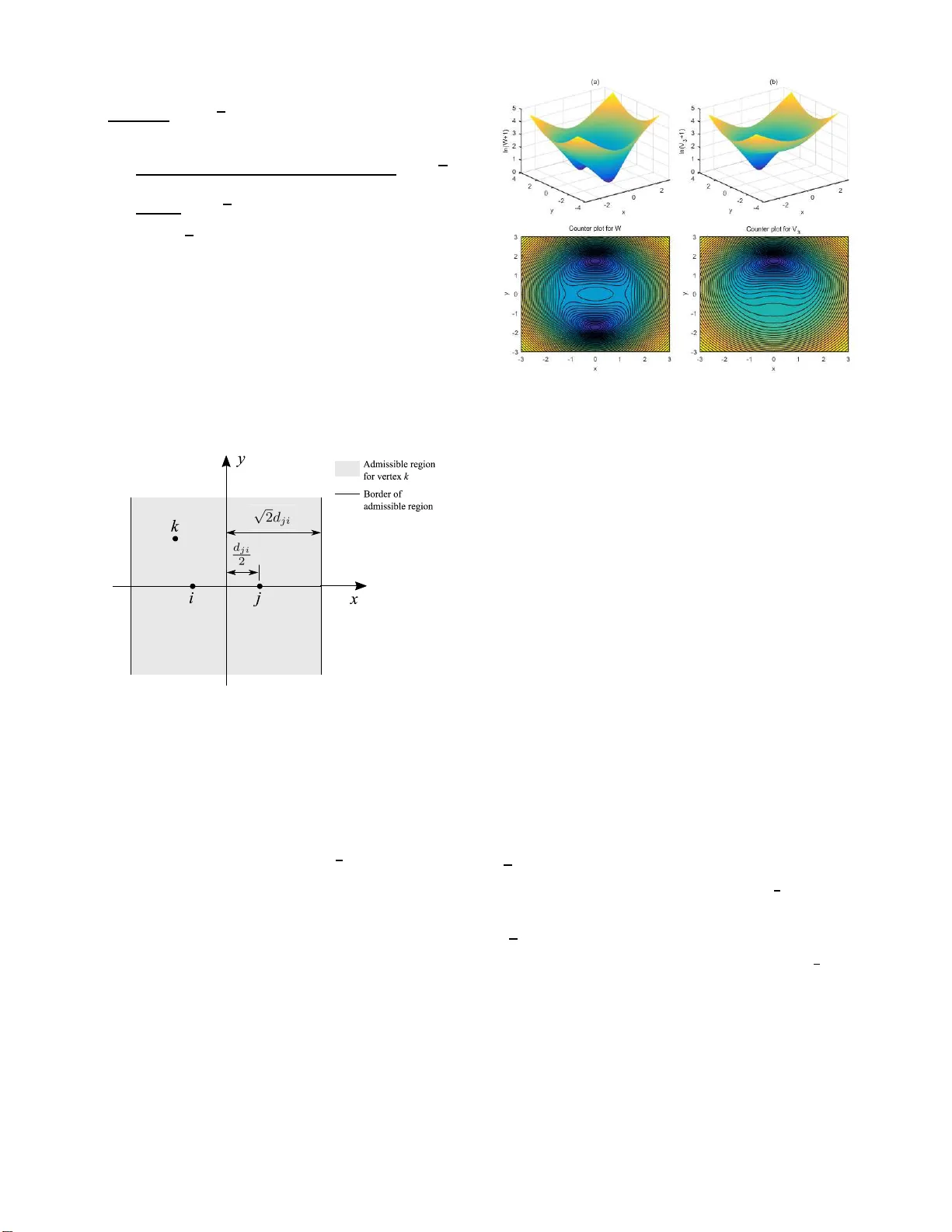
- **부호 면적**: 삼각형 \((i,j,k)\) 의 부호 면적 \(S(p)=\frac12(p_k-p_i)^\top J(p_k-p_j)\) 를 도입한다. 부호는 정방향(양)·역방향(음)을 구분하고, 0이면 콜리니어이다.
**3. 문제 정의**
\(N\)개의 단일 적분기 에이전트 \(\dot p_i = u_i\) 가 주어지고, 목표 형성은 방향성 프레임워크 \(F^*=(G^*,p^*)\) 로 정의한다. 그래프는 LFF 구조이며, 각 에지는 거리 \(d_{ji}\) 로 지정된다. 목표는 실제 형성 \(F(t)=(G^*,p(t))\) 가 강한 동형성 집합 \(SC_{gt}(F^*)\) 로 수렴하는 것이다. 이를 위해 거리 오차 \(z_{ji}\) 와 면적 오차 \(\tilde S_{ijk}\) 를 정의한다.
**4. 제어 설계**
포텐셜 함수
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기