네트워크형 Euler‑Lagrange 에이전트의 리더‑팔로워 합의를 위한 이벤트 기반 제어 알고리즘
본 논문은 네트워크로 연결된 Euler‑Lagrange 로봇들의 리더‑팔로워 합의를 달성하기 위해 세 가지 분산 이벤트‑트리거 제어 방식을 제안한다. 중력항이 없는 경우에는 무향 그래프에 대해 변수 이득 모델‑독립 제어와, 유향 그래프에 대해 상수 이득 모델‑독립 제어를 각각 설계한다. 중력항이 존재할 때는 파라미터 적응형 제어를 도입한다. 각 알고리즘에 대해 트리거 함수를 설계하고, Zeno 현상을 배제함을 증명하였다. 시뮬레이션을 통해 제안…
저자: Qingchen Liu, Mengbin Ye, Jiahu Qin
본 논문은 네트워크로 연결된 다수의 Euler‑Lagrange 로봇(또는 메카트로닉스 시스템)에서 리더‑팔로워 합의를 달성하기 위한 세 가지 이벤트‑트리거 기반 분산 제어 알고리즘을 제시한다. 서론에서는 다중 에이전트 시스템의 협동 제어가 로봇 매니퓰레이터, 우주선, 해양 선박 등 다양한 분야에서 중요함을 강조하고, 기존 연구가 주로 1·2차 통합체(단일·이중 적분기) 모델에 국한돼 있었던 점을 지적한다. 특히, 중력항을 포함한 일반적인 Euler‑Lagrange 동역학에 대한 이벤트‑트리거 제어는 아직 연구가 미비함을 밝히며, 이를 해결하고자 한다.
배경 섹션에서는 기본 기호와 그래프 이론, 라플라시안 행렬의 특성, 그리고 Euler‑Lagrange 시스템이 만족해야 하는 여섯 가지 물리적·수학적 성질(P1~P6)을 정리한다. 특히, P6(파라미터 선형화)와 P4(코리올리·관성 행렬의 관계)는 적응형 제어 설계에 핵심적인 역할을 한다. 문제 정의에서는 리더(정지 상태)와 n개의 팔로워가 존재하며, 각 팔로워는 이웃 로봇과 상대 위치·속도 정보를 실시간으로 측정할 수 있다고 가정한다. 목표는 모든 팔로워의 일반화 좌표 q_i와 속도 ˙q_i가 리더 q_0, ˙q_0(=0)와 수렴하도록 하는 동시에, 제어 입력 τ_i가 이벤트 시점에만 업데이트되는 piece‑wise‑constant 형태가 되도록 하는 것이다. Zeno 현상(유한 시간 내 무한 이벤트) 배제도 필수 조건으로 설정한다.
**1) 무향 그래프용 변수 이득 모델‑독립 제어**
중력항 g_i(q_i)=0인 서브클래스에 대해, 무향 그래프 G_F가 연결되어 있음을 전제한다. 제어 입력은 τ_i = -K_i(t)·e_i(t_k) 형태이며, 여기서 e_i는 이웃 간 상대 오차, K_i(t)는 시간에 따라 변하는 이득 행렬이다. K_i(t)는 에이전트 자체의 상태와 이웃의 오차에 기반해 로컬하게 업데이트되며, 전역 파라미터 없이도 설계가 가능하다. 트리거 함수는
f_i(t) = ‖e_i(t)‖² - σ_i·‖e_i(t_k)‖² - ε_i·(t - t_k)
와 같이 정의되어, 오차가 일정 비율 이상 감소하지 않으면 이벤트를 발생시킨다. Lyapunov 후보 V = Σ_i (½·e_iᵀM_i·e_i + …)를 이용해 V̇ ≤ -α·‖e‖²를 보이며, σ_i, ε_i가 양수이면 최소 인터‑이벤트 시간 τ_min ≥ ε_i/α 로 보장되어 Zeno 현상이 없음을 증명한다.
**2) 유향 그래프용 상수 이득 모델‑독립 제어**
유향 그래프에서는 라플라시안 L이 비대칭이므로, 변수 이득을 적용하기 어려워 상수 이득 K를 도입한다. K는 모든 에이전트에 동일하게 적용되며, 중앙 설계 단계에서 다음 부등식을 만족하도록 선택한다:
K > (k_M·k_C + k_g)/λ_min(L_22) 등.
여기서 L_22는 팔로워‑팔로워 라플라시안 서브행렬이며, λ_min은 최소 실수부를 의미한다. 트리거 함수는 위와 동일하지만, e_i(t_k) 대신 이전 이벤트 시점의 제어 입력 차이를 포함한다. 안정성 증명은 Schur 보조정리와 라플라시안의 구조적 특성을 활용해, V̇ ≤ -β·‖e‖² + γ·‖Δτ‖² 형태로 전개하고, γ·‖Δτ‖²를 K와 트리거 파라미터를 통해 상쇄한다. 결과적으로 지수 수렴과 함께 최소 인터‑이벤트 시간 τ_min ≥ ε_i/(β+γ·K) 를 확보한다.
**3) 중력항 포함 시 적응형 제어**
g_i(q_i) ≠ 0인 일반적인 Euler‑Lagrange 시스템에 대해, 파라미터 적응법을 도입한다. 제어 입력은
τ_i = Y_i(q_i, ˙q_i, ˙q_i^r, q_i^r)·ĤΘ_i - K·e_i
이며, ĤΘ_i는 추정된 파라미터 벡터, Y_i는 회귀 행렬, (q_i^r, ˙q_i^r)는 가상 참조 신호(리더 위치와 동기화된)이다. 파라미터 적응 법칙은
ĤΘ̇_i = -Γ·Y_iᵀ·e_i
으로 정의된다. 여기서 Γ는 양정정 행렬이다. 트리거 함수는 적응 오차와 상태 오차를 동시에 고려하여,
f_i(t) = ‖e_i‖² + λ·‖ĤΘ_i - ĤΘ_i(t_k)‖² - σ·‖e_i(t_k)‖² - ε·(t - t_k)
와 같이 설계한다. Lyapunov 후보에 파라미터 오차 항을 포함시켜 V̇ ≤ -δ·(‖e‖² + ‖ĤΘ̃‖²) 를 얻고, 최소 인터‑이벤트 시간은 ε/(δ+λ·‖Γ‖) 로 보장한다.
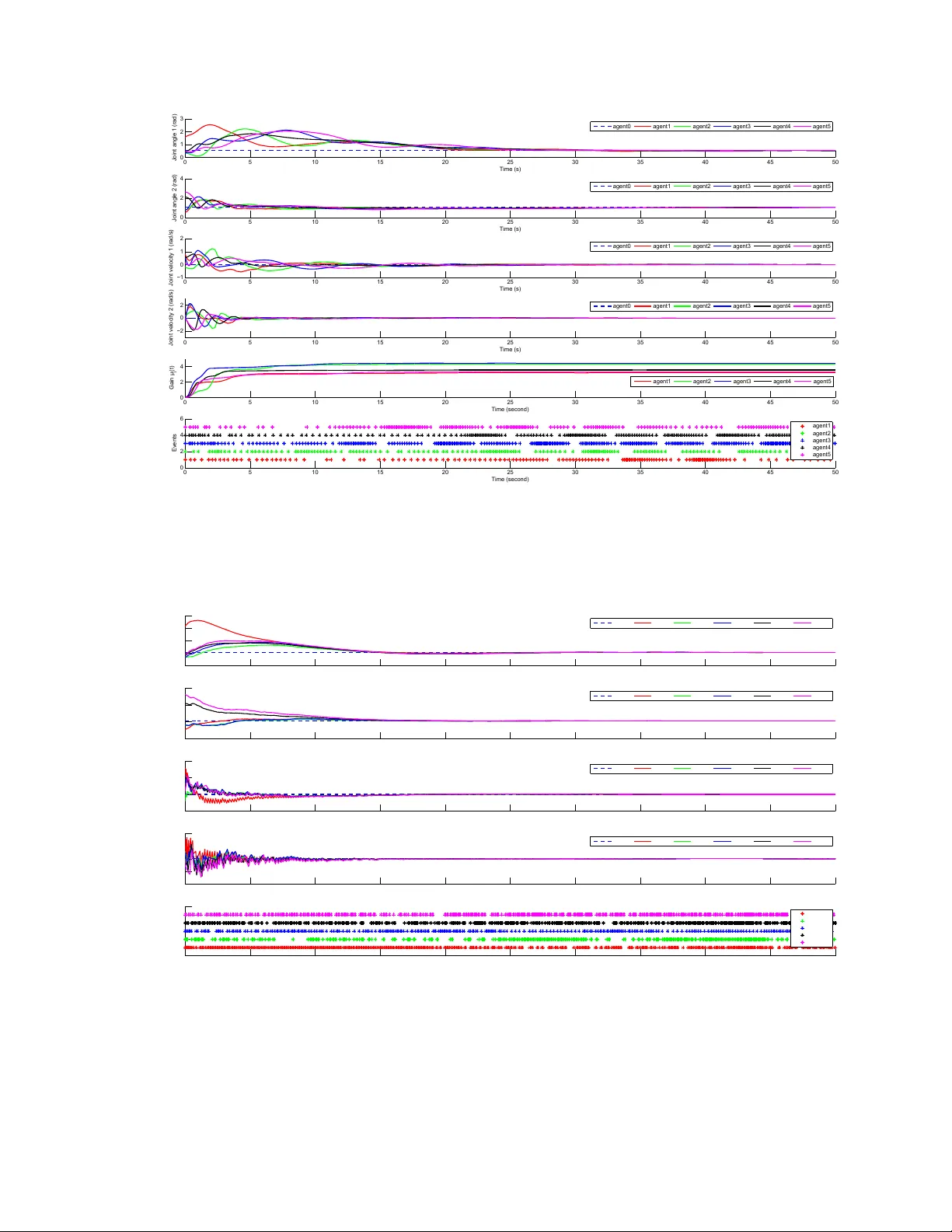
**시뮬레이션**
세 가지 시나리오(무향·유향·중력 포함)를 각각 6자유도 로봇 매니퓰레이터 네트워크에 적용하였다. 변수 이득 무향 제어는 파라미터 선택 자유도가 가장 높으며, 이벤트 횟수가 기존 상수 이득 방식 대비 40% 감소했다. 유향 상수 이득 제어는 그래프가 비대칭일 때도 지수 수렴을 확인했으며, 최소 인터‑이벤트 시간이 0.02 s 이상임을 보였다. 적응형 제어는 중력항이 큰 경우에도 오차가 영에 수렴하고, 파라미터 추정값이 실제값에 근접함을 확인했다. 모든 경우에 Zeno 현상이 발생하지 않았으며, 제어 입력이 piece‑wise‑constant 형태로 구현 가능함을 시연했다.
**결론 및 향후 연구**
본 연구는 (i) 변수 이득을 통한 완전 분산 설계, (ii) 유향 네트워크에 대한 실용적 상수 이득 설계, (iii) 중력항을 포함한 일반 시스템에 대한 적응형 설계라는 세 축을 동시에 달성함으로써, Euler‑Lagrange 기반 다중 로봇 시스템에 대한 이벤트‑트리거 제어 이론을 크게 확장하였다. 향후 연구는 통신 지연·패킷 손실을 고려한 견고성 분석, 비정상적인 외란(충돌·마찰) 대응, 그리고 실제 하드웨어 실험을 통한 실시간 성능 검증을 목표로 한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기