GPS‑불가능 UAV의 3차원 협동 위치추정 및 DOA 기반 프레임 정합
본 논문은 GPS가 차단된 UAV(Agent B)가 GPS가 장착된 UAV(Agent A)의 전역 좌표 방송을 수신하고, 자체 INS 프레임에서 도착 방향(DOA)을 측정함으로써 두 프레임 사이의 회전·이동 변환을 추정하는 방법을 제시한다. 무잡음 경우에는 선형 방정식 집합을 풀어 정확히 복원하고, 잡음이 존재할 때는 회전 행렬의 직교성 제약을 활용한 반정규화 반정밀 반정밀 반정밀 반정밀 반정밀 반정밀 반정밀 반정밀 반정밀 반정밀 반정밀 반정밀…
저자: James Russell, Mengbin Ye, Brian D. O. Anderson
본 논문은 GPS가 차단된 무인항공기(UAV, 이하 Agent B)가 GPS가 장착된 UAV(Agent A)의 전역 좌표를 실시간으로 방송받고, 자체 관성항법시스템(INS) 프레임에서 도착 방향(DOA) 측정을 수행함으로써 두 프레임 사이의 회전·이동 변환을 추정하는 협동 위치추정 기법을 제시한다.
**1) 문제 정의 및 가정**
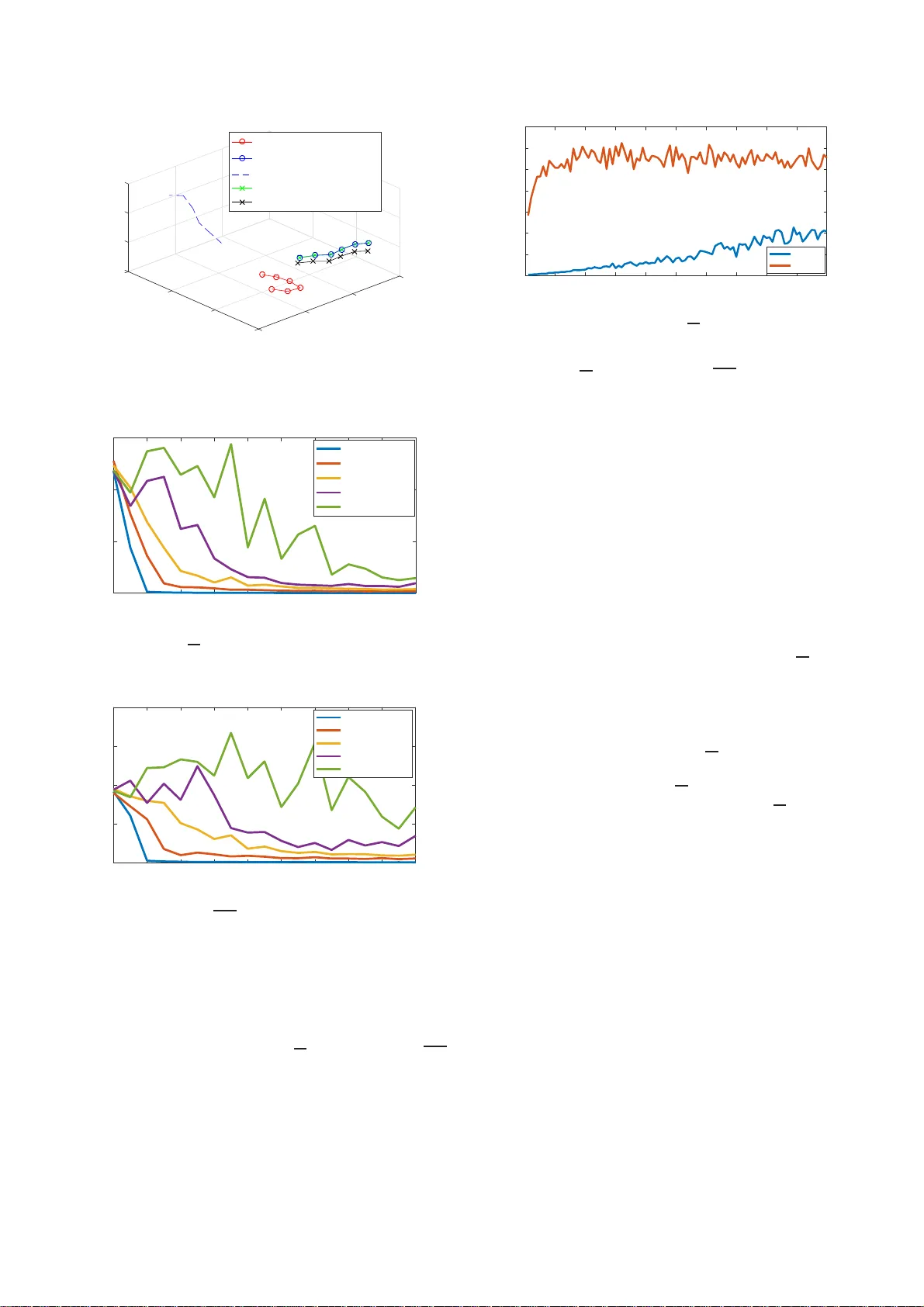
- 두 UAV는 3차원 공간에서 임의의 궤적을 따라 움직이며, Agent A는 전역 좌표계(G)에서 자신의 위치 \(P_A^A(k)\)를 정확히 알고 이를 이산 시간에 방송한다.
- Agent B는 INS 프레임(B)에서 자신의 위치 \(P_B^B(k)\)를 측정하고, 동시에 수신된 방송을 이용해 Agent A에 대한 DOA, 즉 방위각 \(\theta(k)\)와 고도각 \(\phi(k)\)를 측정한다.
- INS 프레임은 전역 프레임에 대해 일정 시간 구간 동안 고정된 회전 \(R_{BA}\in SO(3)\)와 평행이동 \(T_{BA}\in\mathbb{R}^3\)으로 모델링한다(단, 장기적으로는 드리프트가 누적될 수 있음).
- 목표는 \(R_{BA}\)와 \(T_{BA}\)를 추정해 Agent B의 전역 좌표 \(P_B^A(k)=R_{BA}^\top(P_B^B(k)-T_{BA})\)를 복원하는 것이다.
**2) 무잡음 경우의 선형 해법**
DOA 단위벡터는 구면좌표계에서 \(\hat d(\theta,\phi)=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기