동적 연합 사이버물리 시스템을 위한 타이밍 API TickTalk
TickTalk은 사이버물리 시스템(CPS)에서 시간과 동기화 요구를 프로그래밍 언어 수준에서 다루기 위한 프레임워크이다. 언어, 시스템, 네트워크, 디바이스 네 계층에 걸쳐 가변 정밀도의 동기화 섬을 동적으로 연합하고, 타이밍 제약을 중간 표현으로 통합한다. 이를 통해 개발자는 코드 블록의 시간 의도를 선언만 하면 런타임과 네트워크가 자동으로 정확한 동기화와 전력 효율을 제공한다.
저자: Bob Iannucci, Aviral Shrivastava, Mohammad Khayatian
본 논문은 사이버물리 시스템(CPS)에서 시간과 동기화가 핵심이지만 현재 프로그래밍 언어에 부재한 상황을 지적하고, 이를 해결하기 위한 **TickTalk**이라는 통합 프레임워크를 제안한다. 저자들은 먼저 스마트시티와 같은 대규모 IoT 환경에서 **동적으로 연합되는 섬(island)** 개념을 도입한다. 예시로 트럭을 추적하기 위해 도시 전역에 흩어진 카메라를 실시간으로 모집하고, 이 카메라 군집을 시간에 따라 재구성되는 섬으로 모델링한다. 각 섬은 자체적인 **가변 정밀도 동기화** 요구를 가질 수 있으며, 필요에 따라 UTC와의 고정밀 동기화 혹은 로컬 클럭 기반의 저정밀 동기화를 선택한다.
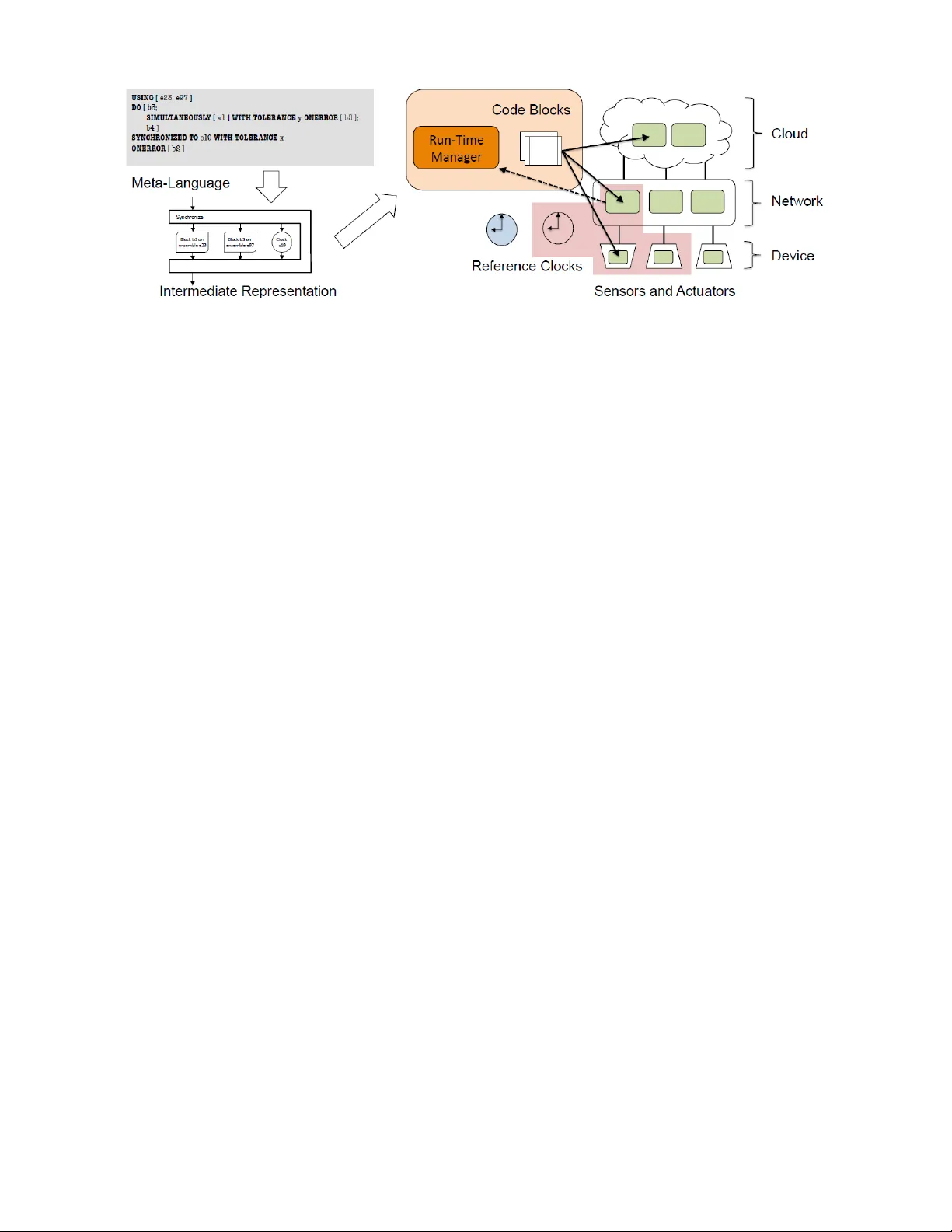
언어 차원에서는 **시간 관련 프라미티브**를 새롭게 정의한다. 예를 들어 `printf("hello", @4:35 PM);`와 같은 구문을 통해 개발자는 코드에 직접 시간 의도를 삽입한다. 이러한 구문은 컴파일러가 **중간 언어(IL)** 로 변환될 때, 타이밍 제약을 **데이터플로우 그래프**의 노드와 엣지에 메타데이터 형태로 부착한다. 그래프의 각 노드는 특정 **코드 블록 인스턴스**이며, 엣지는 데이터 의존성뿐 아니라 **동기화 토큰**을 전달한다. 토큰은 런타임 매니저가 클럭 드리프트, 네트워크 지연, WCET 등을 고려해 동적으로 생성·소비한다.
시스템 차원에서는 **런타임 매니저(RTM)** 가 코드 블록의 배치, 동기화 수준 결정, 그리고 클럭 가상화를 담당한다. RTM은 네트워크 피드백을 받아 동기화 정확도를 조정하고, 전력 효율을 위해 디바이스를 **저전력 모드**로 전환한다. 필요 시에는 디바이스가 **just‑in‑time** 으로 깨어나 고정밀 동기화 패킷을 수신하고, 즉시 센서/액추에이터를 작동시킨다.
네트워크 차원에서는 기존 PTP/IEEE‑1588 프로토콜을 기반으로 **다중 레벨 동기화**를 제안한다. 모든 노드가 항상 고정밀 UTC에 동기화되는 것이 아니라, 애플리케이션이 요구하는 정밀도에 따라 **동기화 주기와 정밀도**를 조절한다. 이는 네트워크 트래픽을 최소화하고, 지연 변동성을 감소시킨다.
디바이스 차원에서는 **클럭 가상화**와 **멀티‑테넌시**를 핵심으로 다룬다. 서로 다른 애플리케이션이 동일한 센서를 공유할 때, 각 코드 블록은 독립적인 가상 클럭을 할당받아 충돌 가능한 타이밍 요구를 격리한다. 런타임은 이러한 가상 클럭 간의 **비동기성**을 조정하고, 필요 시 **동시성 보장**을 위해 동기화 토큰을 삽입한다.
전체 아키텍처는 **언어 → 중간 표현 → 런타임 매니저 → 네트워크/디바이스** 순으로 흐르며, 각 계층이 타이밍 정보를 명시적으로 전달한다. 이를 통해 개발자는 **선언형 타이밍 의도**만을 기술하면, 시스템이 자동으로 코드 블록을 적절한 위치에 배치하고, 전력 효율을 최적화하며, 필요한 정밀도로 동기화한다. 논문은 또한 향후 **레퍼런스 아키텍처**를 제시해 스마트시티 내 다양한 벤더의 디바이스 간 상호운용성을 높일 수 있음을 강조한다.
결론적으로 TickTalk은 프로그래밍 언어 수준에서 시간·동기화 개념을 도입하고, 시스템·네트워크·디바이스 전반에 걸친 지원 메커니즘을 제공함으로써, 동적으로 연합되는 CPS의 개발 복잡성을 크게 낮추고 전력 효율과 확장성을 동시에 달성한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기