액티브 디스토버스 리젝션 제어(ADRC) 실전 적용 가이드
본 논문은 제어 실무자를 위해 선형 ADRC의 기본 원리와 설계 절차를 정리하고, 1차·2차 대표 플랜트에 대한 시뮬레이션을 통해 튜닝 파라미터와 관측기 설계 규칙을 시각적으로 검증한다. 또한 고속 구현을 위한 이산형 변형을 제시한다.
저자: Gernot Herbst
본 논문은 제어 공학 실무자를 대상으로 선형 액티브 디스토버스 리젝션 제어(ADRC)의 기본 개념, 설계 절차, 그리고 시뮬레이션을 통한 성능 검증을 일관된 흐름으로 제시한다. 서론에서는 ADRC가 PID와 모델 기반 제어 사이의 중간 지점으로 부상했으며, 복잡한 모델링 없이도 교란을 ‘일반화된 교란(f)’이라는 하나의 상태로 묶어 추정·보상함으로써 로버스트성을 확보한다는 점을 강조한다.
2절에서는 1차와 2차 대표 플랜트를 차례로 다루며, 각각의 과정은 다음과 같다.
1) 플랜트 모델을 K·T·s+1 형태(1차) 혹은 K·T²·s²+2D·T·s+1 형태(2차)로 표현하고, 입력 교란 d(t)와 모델 오차 Δb를 포함한 일반화된 교란 f(t)를 정의한다.
2) 교란을 포함한 상태 방정식에 ‘확장 상태’ x₃(=f) 를 추가해 1차는 2차, 2차는 3차 시스템으로 확장한다.
3) Luenberger 형태의 확장 상태 관측기(ESO)를 설계한다. 관측기 이득 l₁, l₂(·l₃)는 관측기 폴을 폐루프 폴보다 3~10배 빠르게 배치하는 규칙(s_ESO≈(3~10)·s_CL)으로 결정한다. 이때 특성 방정식 전개를 통해 l₁=−2·s_ESO, l₂=s_ESO²(·l₃=−s_ESO³)와 같은 간단한 식을 얻는다.
4) 제어 입력은 u(t)=K_P·(r−ŷ)−f̂/b₀ 형태(1차) 혹은 u(t)=K_P·(r−ŷ)−K_D·ẏ̂−f̂/b₀ 형태(2차)로 정의한다. 여기서 ŷ와 f̂는 ESO가 제공하는 추정값이다.
5) K_P와 K_D는 목표 정착 시간(T_settle)에 따라 K_P≈4/T_settle(1차), K_P=s_CL², K_D=−2·s_CL(2차) 로 계산한다.
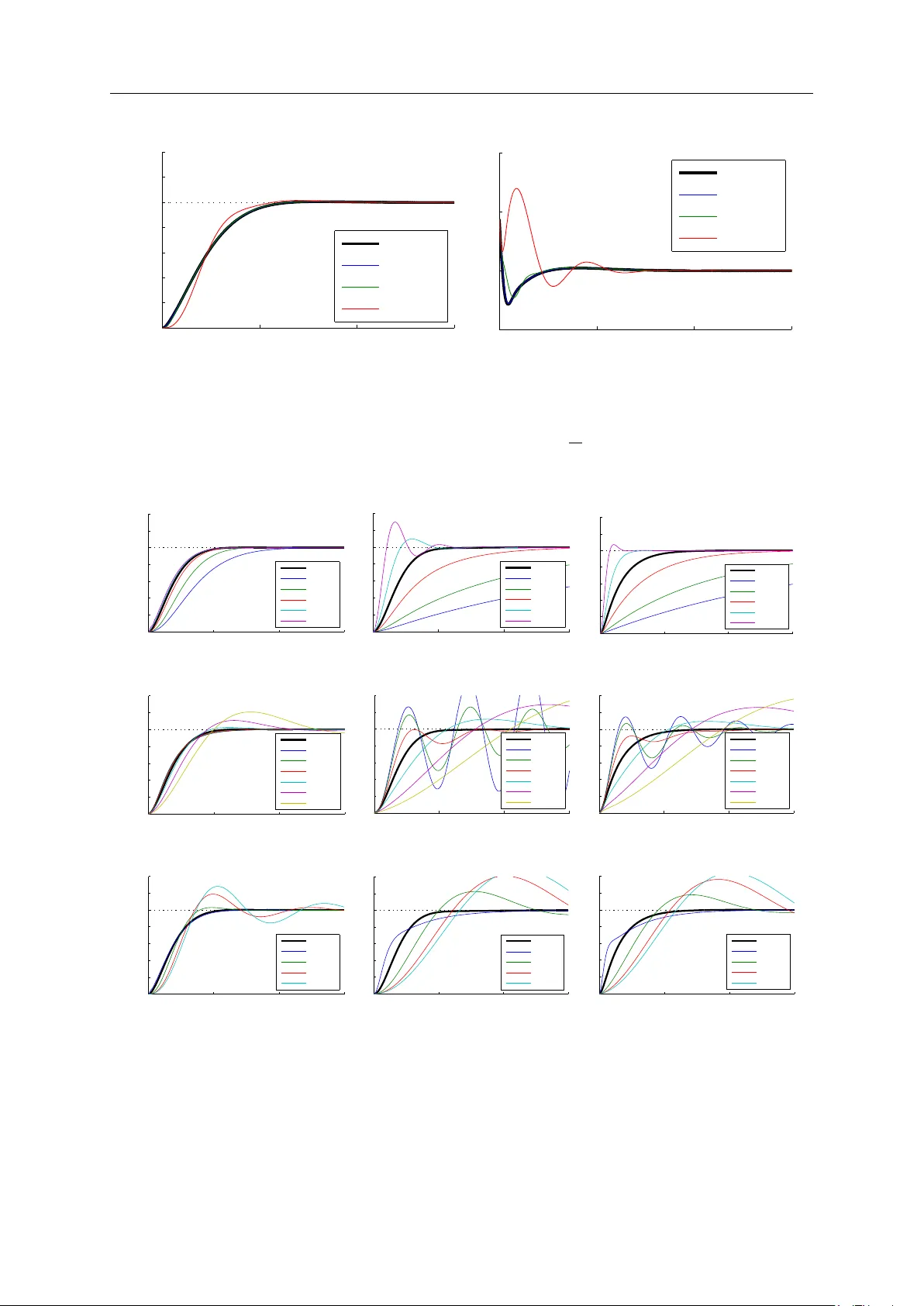
시뮬레이션 섹션에서는 (a) 플랜트 파라미터 변동, (b) 입력 교란, (c) 모델 오차 Δb를 각각 가했을 때의 응답을 그래프와 함께 제시한다. 결과는 ADRC가 교란을 빠르게 추정하고 보상함으로써 설정값을 정확히 추적하며, 전통적인 PID 대비 과도 응답이 짧고 오버슈트가 적다는 것을 시각적으로 확인한다. 또한 관측기 대역폭을 과도하게 높이면 노이즈가 증폭되는 현상도 관찰되어, 설계 시 대역폭 선택의 중요성을 강조한다.
4절에서는 이산형 구현을 다룬다. 기존의 연속형 설계와 동일한 파라미터를 유지하면서도, 샘플링 주기 T_s에 대해 차분 형태로 변환한 ‘통합 관측기·제어기’ 방식을 제안한다. 이 방식은 별도의 관측기와 제어기 루프를 두는 전통적인 구현보다 연산 지연을 크게 줄이며, 고속 제어가 요구되는 전력 전자·모션 제어 등에 적합하다.
마지막으로 2.3절에서는 ADRC를 기존 선형 상태공간 제어와 비교한다. 교란 발생기 모델을 포함한 확장 상태공간 모델을 구성하고, 관측기와 제어법을 동일하게 적용하면 ADRC와 수식적으로 동일함을 보인다. 즉, ADRC는 내부 모델 원리(IMP)를 이용한 교란 추정·보상의 특수 형태이며, 이를 통해 기존 제어 이론과의 연계성을 확보한다.
전체적으로 논문은 ADRC의 이론적 배경을 간결히 정리하고, 실무자가 바로 적용할 수 있는 설계 규칙(관측기 대역폭, K_P·K_D 계산법)과 시뮬레이션 기반 검증을 제공한다. 또한 이산형 최적화 제안을 통해 고속 실시간 구현 가능성을 제시함으로써, 교육·연구·산업 현장에서의 활용 가치를 높인다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기