차량 중량중심 높이를 고려한 이중 트랙 기반 모션 플래너 설계와 평가
본 논문은 기존 입자·키네마틱 플래너가 무시하는 차량 중량중심(CG) 높이와 롤·횡하중 전이를 간소화된 이중 트랙 모델과 정적 타이어 모델로 보완한다. NMPC 기반 최적화로 실시간 구현 가능성을 확보하고, 고·저가속 상황 및 다양한 차량 높이에서 충돌 회피 시뮬레이션을 통해 제안 플래너가 기존 플래너보다 더 현실적인 궤적을 제공하며 트래킹 제어기의 부하를 감소시킴을 입증한다.
저자: Syed Adil Ahmed, Taehyun Shim
본 논문은 자율주행 차량 제어 체계에서 상위‑계층인 궤적 플래너가 차량 고유의 동역학을 충분히 반영하지 못하는 문제점을 지적한다. 기존에 널리 사용되는 입자 모델(3‑DOF)과 키네마틱 바이시클 모델은 차체의 중량중심(CG) 높이와 롤·횡하중 전이를 무시한다. 이러한 단순화는 특히 CG가 높은 미니밴·SUV와 같은 차량에서 급제동·급선회 시 과도한 롤 각과 하중 이동을 초래하고, 하위‑계층 트래킹 컨트롤러가 비현실적인 가속·조향 명령을 보상하려다 제어 한계에 도달할 위험을 야기한다.
이를 해결하기 위해 저자들은 ‘간소화된 이중 트랙(double‑track)’ 모델을 제안한다. 이 모델은 차량을 전·후 차축 두 개의 트랙으로 나누어, 각 차축에 작용하는 횡하중을 정적 롤 모멘트 평형식으로 계산한다. 차체 질량 m, 서스펜션 강성 k_s, CG 높이 h, 전·후 차축 거리 a, b, 그리고 종속적인 종횡가속도 a_x, a_y를 이용해 전·후 차축의 수직 하중 F_zf, F_zr을 구한다. 이렇게 얻은 하중은 타이어 모델에 직접 입력되어 코너링 강성 C_α를 보정한다. 타이어 모델은 Magic‑Formula 데이터를 기반으로 한 2차 다항식 형태로 단순화했으며, 포화 구간을 명시해 비선형 특성을 유지하면서도 계산량을 크게 줄였다.
플래너의 상태 변수는 longitudinal 속도 v_x, lateral 속도 v_y, yaw rate r, 그리고 Frenet 좌표계상의 전방 거리 s와 횡오프셋 e_y만을 사용한다. 휠 속도·차축 회전 속도와 같은 고속 동역학은 제외함으로써 NMPC 문제의 차원을 감소시켰다. 최적화 목표는 (1) 목표 궤적(횡오프셋 0, 목표 속도) 추적, (2) 조향·가속 입력 변화율 최소화, (3) 전체 제어 입력 최소화, (4) 타이어 슬립 각 제한을 포함한다. 제약식에는 차량 동역학 방정식, 타이어 포화 한계, 그리고 장애물 회피를 위한 타원형 Euclidean norm이 포함된다.
수치 해석은 CasADi 3.6.5와 MATLAB 환경에서 IPOPT 솔버를 이용해 수행되었다. 다중 샘플링 방식(RK4)과 워밍 스타트 기법을 적용해 0.1 s 샘플 타임, 2.5 s~5 s 예측 호라이즌(N = 25~50)에서 실시간 계산(10‑15 ms)을 달성했다.
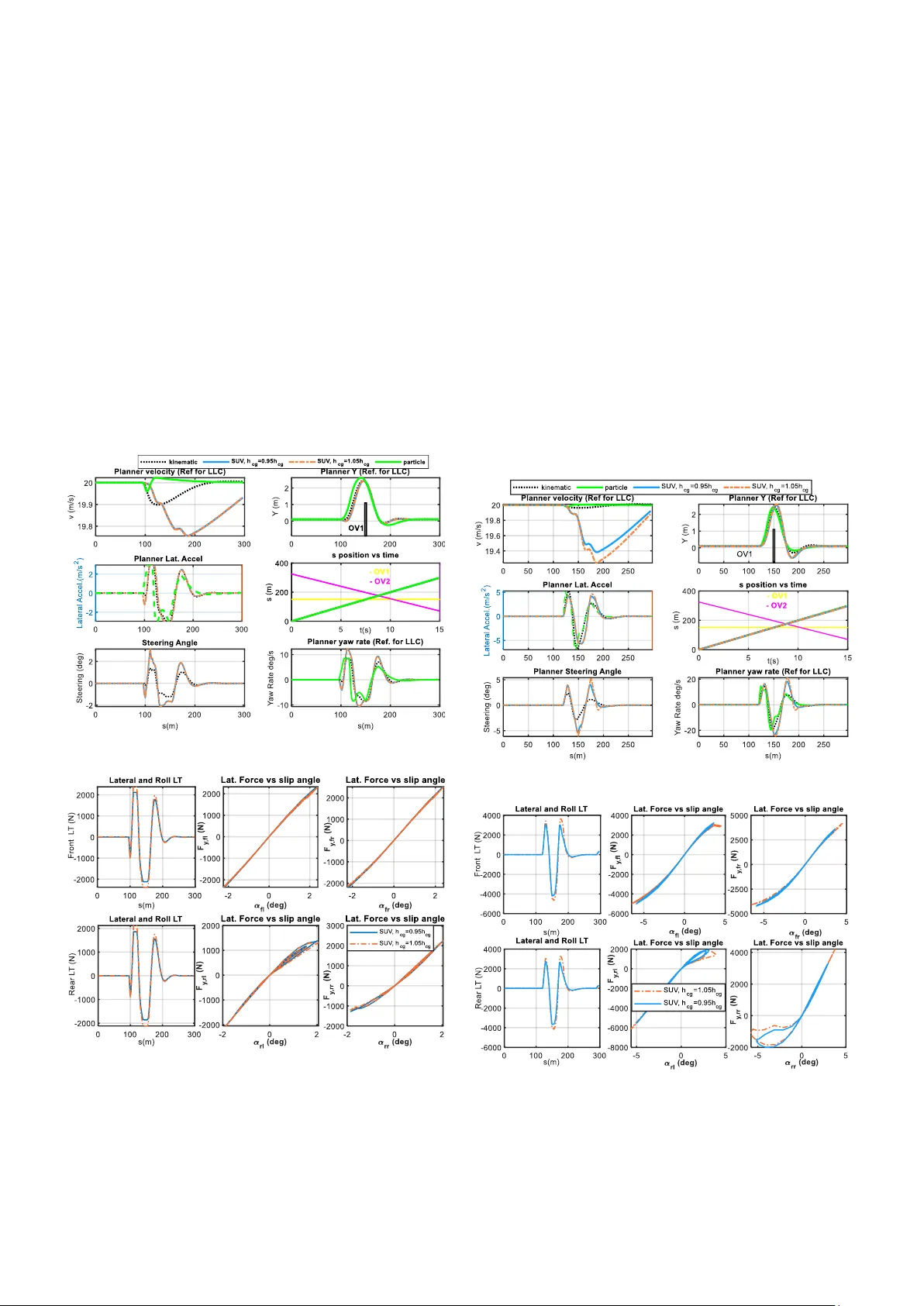
시뮬레이션 시나리오는 정적 장애물과 맞은편 차선의 진행 차량을 포함한 충돌 회피 상황이다. 두 종류의 SUV(높이 h = 0.95 m, h ≈ 1.2 m)를 대상으로 저가속(0.5 g)과 고가속(1.5 g) 두 경우를 실험했다. 입자·키네마틱 플래너는 동일한 경로를 출력했지만, 고중심 차량에서는 롤 각이 5° 이상 급증하고, 트래킹 컨트롤러가 요구하는 조향·가속 명령이 비현실적인 수준에 도달했다. 반면 제안 플래너는 하중 전이를 반영해 롤 각을 2° 이하로 억제하고, yaw rate와 lateral offset이 목표값에 더 가깝게 수렴했다. 또한, 조향·가속 입력 변화율이 감소해 승차감과 에너지 효율성이 동시에 개선되었다.
결과적으로, 플래너 단계에서 차량 동역학(특히 CG 높이와 롤·횡하중 전이)을 고려하면 트래킹 단계의 부하를 크게 경감시킬 수 있다. 이는 고중심 차량이 급격한 기동을 수행할 때 안전성과 승차감을 동시에 보장한다는 점에서 의미가 크다. 논문은 향후 실제 차량 실험과, 플래너와 트래커를 통합한 하이브리드 제어 구조 개발을 제안하며, 실시간 구현 가능성을 더욱 확대할 필요성을 강조한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기