두뇌기저부 수술을 위한 촉각 보조 협동 로봇 프레임워크
본 논문은 두개골 기저부 수술에서 외과의사의 상황 인식을 향상시키기 위해, 가상 고정점(virtual fixture)을 이용한 촉각 보조 모드를 탑재한 협동 로봇 시스템을 설계·구현하고, 치과석 및 사체 모델을 이용한 초기 실험을 통해 촉각 피드백이 중요한 해부학적 구조를 안전하게 보존하면서 드릴링 효율을 높임을 입증하였다.
저자: Hisashi Ishida, Manish Sahu, Adnan Munawar
두개골 기저부 수술은 뇌와 청각, 안면 신경 등 중요한 해부학적 구조가 밀집해 있어, 미세한 드릴링 기술과 높은 상황 인식 능력이 요구되는 고난이도 분야이다. 기존의 이미지‑가이드 수술 내비게이션은 환자별 해부학적 변이를 완전히 반영하지 못하고, 외과의사의 손‑눈 협응에 크게 의존한다는 한계가 있다. 이러한 문제점을 해결하고자, 저자들은 ‘협동 로봇 + 촉각 보조’라는 새로운 프레임워크를 제안한다.
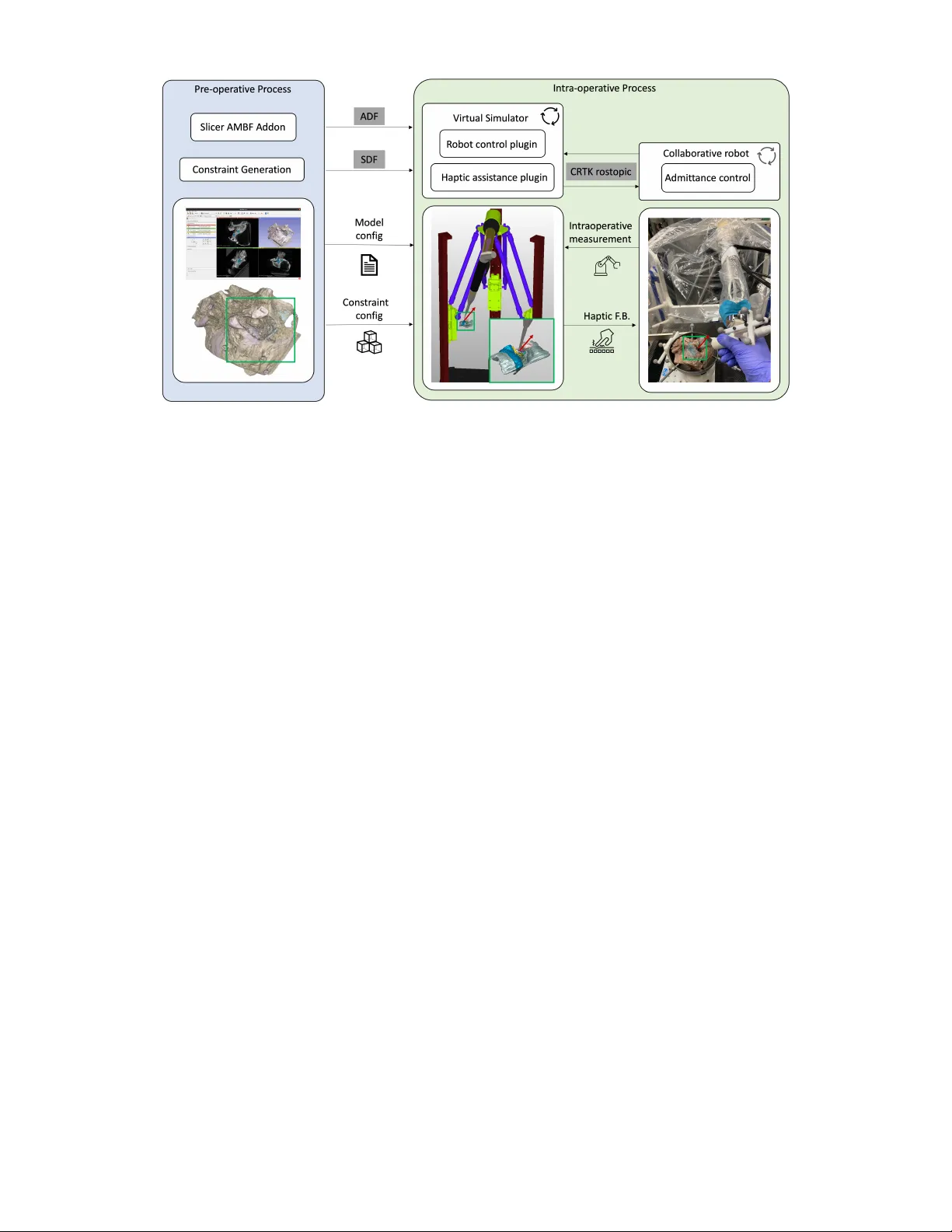
시스템은 크게 네 부분으로 구성된다. (1) 환자 CT에서 해부학적 구조를 분할하고, 3‑D Signed Distance Field(SDF)로 변환한다. SDF는 각 voxel이 해당 구조와 얼마나 떨어져 있는지를 수치화해, 거리와 방향 정보를 실시간으로 제공한다. (2) AMBF(Asynchronous Multi‑Body Framework) 기반의 가상 시뮬레이터를 구축하여, 환자 모델, 협동 로봇, 드릴을 동일한 물리 환경에 배치한다. 시뮬레이터는 로봇 상태와 광학 트래커 데이터를 지속적으로 받아 가상 모델을 업데이트하고, SDF 기반 가상 고정점을 적용해 드릴 팁과 위험 구조 사이의 거리를 모니터링한다. (3) ‘Haptic assistance plugin’이 SDF 정보를 바탕으로 보조 힘을 계산한다. 보조 힘은 식 (1)·(2)에서 정의된 거리 임계값 τ₀(강제 제약)과 τ_f(피드백 활성화), 그리고 감쇠 상수 λ에 따라 비선형적으로 증가한다. 보조 힘의 최대값 F_max은 외과의사가 가하는 손 힘(F_H)의 크기에 비례하도록 동적으로 조정된다. (4) 계산된 보조 힘은 협동 로봇의 admittance 제어에 삽입된다. 기존 admittance 제어식 arg min |G·F_H − J·Δq|에 보조 힘 F_C를 더해, 최종 제어식 arg min |G·(F_H + F_C) − J·Δq|가 된다. 여기서 G는 로봇의 admittance 이득, J는 Jacobian, Δq는 관절 속도이다. 보조 힘은 사용자의 손 힘과 방향이 일치하도록 식 (3)으로 조정되어, 외과의사의 의도를 억제하지 않으면서도 위험 구조에 접근할 때 자연스럽게 반대 방향으로 유도한다.
시스템 구현을 위해, 저자들은 3‑D Slicer와 AMBF 간의 플러그인 연동을 수행했으며, 환자 데이터는 ‘seg.nrrd’ 형식에서 AMBF Description Files(ADF)로 변환하였다. 협동 로봇은 REMS(Robotic ENT Microsurgery System) 플랫폼을 사용했으며, 로봇 자체의 admittance controller에 보조 힘을 삽입함으로써 별도의 저수준 제어 코드를 작성할 필요 없이 모듈식 통합을 달성했다. 드릴의 무게에 의한 중력 효과는 Bernstein 다항식 기반 모델을 적용해 보상했으며, 광학 트래커(FusionTrack 500)를 이용해 로봇‑드릴‑환자 좌표계 간의 서브밀리미터 정밀 캘리브레이션을 수행했다.
실험은 두 단계로 진행되었다. 첫 번째는 치과석(덴탈 스톤) 팬텀을 이용해 파라미터 튜닝과 시스템 검증을 수행했다. 여기서는 τ₀=1 mm, τ_f=4 mm, λ=1.0을 사용했으며, 보조 힘이 적용된 경우와 적용되지 않은 경우를 비교했다. 두 번째는 인간 사체의 측두골을 이용한 실제 수술 시뮬레이션이다. 이때는 τ₀를 0.5 mm로 감소시키고, λ를 2.0으로 조정해 외과의사가 더 가까이 접근할 수 있도록 했다. 실험에 참여한 의료 학생 1명과 숙련 외과의사 2명은 모두 시야가 차단된 상황에서도 위험 구조(예: 안면신경)를 침범하지 않고 안전하게 골격화 작업을 수행했다. 특히, 보조 힘이 없는 경우에는 몇 차례 구조 침범 위험이 관찰되었지만, 보조 힘이 활성화된 경우에는 모든 시도에서 구조 침범이 0%였으며, 작업 시간도 유의미하게 단축되었다.
논문의 주요 기여는 다음과 같다. 1) 환자‑특이적 SDF를 이용해 복잡한 비평면 해부학적 제약을 자동으로 생성하고, 이를 실시간 가상 시뮬레이션에 통합하는 파이프라인을 구축했다. 2) 협동 로봇의 admittance 제어에 촉각 보조 힘을 자연스럽게 삽입해, 외과의사의 의도와 안전 제약을 동시에 만족시키는 제어 방식을 구현했다. 3) 초기 임상 전 단계 실험을 통해 촉각 보조가 실제 수술 안전성을 크게 향상시킬 수 있음을 실증했다.
향후 연구 과제로는 (a) 다중 구조에 대한 동시 제어와 복합 가중치 기반 보조 힘 최적화, (b) 실시간 영상(예: intra‑operative OCT)과의 융합을 통한 동적 가상 고정점 업데이트, (c) 장기 임상 시험을 통한 사용자 학습 곡선 및 비용‑효과 분석, (d) 다른 외과 분야(예: 척추, 복강경)로의 확장 가능성 검증 등이 있다. 이러한 발전이 이루어진다면, 촉각 보조 협동 로봇은 두개골 기저부 수술뿐 아니라 다양한 고위험 최소 침습 수술에서 외과의사의 인지 부하를 감소시키고, 환자 안전을 극대화하는 핵심 기술로 자리매김할 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기