최대 수용 영역과 최소 예측 제어 지평을 갖는 이산시간 LTI 시스템을 위한 집합 기반 MPC
본 논문은 최소 예측·제어 지평(N)에서도 시스템의 최대 수용 영역을 확보할 수 있는 새로운 집합 기반 모델 예측 제어(MPC) 방식을 제안한다. 하나의 최적화 문제로 구성된 이 설계는 상태가 최대 제어 가능 집합 안에 있을 때와 N‑단계 제어 가능 집합에 있을 때 두 가지 동작 모드를 동시에 구현한다. 제안된 MPC는 집합 레이어를 이용해 상태를 단계별로 이동시키며, 인공 평형점 변수를 도입해 목표점 변화에도 재귀적 실현 가능성과 비대칭 안정…
저자: Alej, ro Anderson, Agustina DJorge
본 논문은 이산시간 선형 시불변(LTI) 시스템에 대한 모델 예측 제어(MPC) 설계에서, 제어 지평(N)을 최소화하면서도 시스템이 가질 수 있는 최대 수용 영역(maximal domain of attraction)을 확보하는 새로운 집합 기반 접근법을 제시한다. 전통적인 MPC는 안정성을 보장하기 위해 터미널 제약이나 비용을 사용하지만, 이는 상태가 터미널 집합에 도달할 수 있는 경우에만 적용 가능하며, 따라서 수용 영역이 제한된다. 특히, 목표점(setpoint)이 변할 경우 기존 터미널 제약이 무효화되어 실현 가능성이 상실되는 문제가 있다. 이러한 문제를 해결하기 위해 기존 연구에서는 MPCT(MPC for Tracking)와 같은 방법을 제안했으며, 인공 평형점 변수를 도입해 목표점 변화에도 재귀적 실현 가능성을 확보한다. 그러나 MPCT는 수용 영역을 S_N (N‑step controllable set) 정도로만 확대할 수 있어, 최대 수용 영역인 S∞ 에 도달하지 못한다.
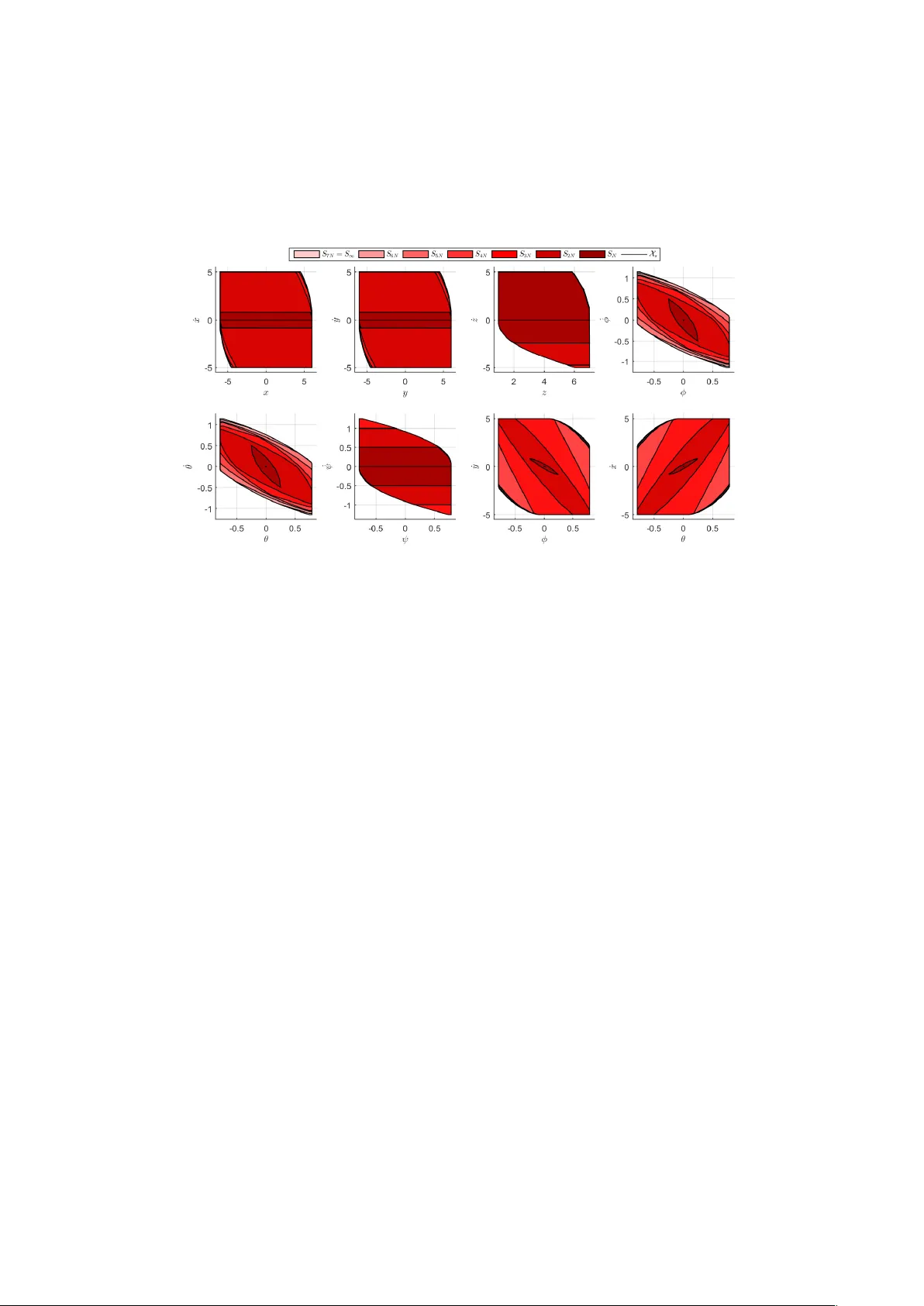
본 논문은 이러한 한계를 극복하기 위해 두 가지 핵심 개념을 도입한다. 첫 번째는 ‘계약 불변 집합(contractive control invariant set, CIS)’이다. 계약 불변 집합 Ω는 모든 x∈Ω 에 대해 적절한 입력 u∈U 가 존재해 다음 상태 Ax+Bu 가 S∞ 의 내부에 들어가도록 보장한다. Lemma 2.5·2.6 에서 증명된 바와 같이, Ω 로부터 유도된 i‑step 제어 가능 집합 S_i(Ω,U) 역시 계약 불변성을 유지한다. 두 번째는 ‘k‑Layer 집합(L_k^N)’이다. 시스템의 최대 제어 가능 집합 S∞ 를 N‑step 제어 가능 집합 S_N 으로부터 시작해 단계별로 레이어화한다. 구체적으로 L_k^N = S_{(k+1)N} \ S_{kN} 로 정의되며, 이는 서로 겹치지 않는 불연속 집합들의 합으로 S∞ 를 완전하게 분해한다.
제어기는 현재 상태 x 가 어느 레이어에 속하는가에 따라 두 가지 동작 모드 중 하나를 선택한다. (1) x ∈ S∞ \ S_N (즉, 레이어 외부)인 경우, 목표 레이어 Ω_x 를 현재 레이어에 해당하는 L_k^N 로 설정하고, 보조 변수 x_a , u_a 를 이용해 상태와 입력이 각각 Ω_x 와 대응 입력 집합 Ψ(Ω_x) 에 얼마나 가까운지를 비용에 포함한다. 이때 인공 평형점 x_s 는 목표점 x* 와 동일하게 설정되어, 목표점 변화가 즉시 반영된다. (2) x ∈ S_N 내부에 들어오면, Ω_x 은 단일 평형점 {x_s} 로 축소되고, 기존 MPCT와 동일한 구조가 적용된다. 즉, 터미널 제약 x_N = x_s 와 인공 평형점 비용 V_O(x_s,x*) 를 통해 점근적 안정성을 확보한다.
수학적으로는 다음과 같은 최적화 문제 P_N(x,x*) 를 정의한다.
min_{u,x_a,u_a,x_s} V_N(x;u,x_a,u_a,x_s)
subject to: 시스템 동역학, 상태·입력 제약, 보조 변수 제약 x_a_j ∈ Ω_x, u_a_j ∈ Ψ(Ω_x), 최종 상태 x_N ∈ Ω_x, 그리고 x_s ∈ X_s.
비용 함수 V_N 은 (i) 상태와 보조 상태 간 거리 ‖x_j - x_a_j‖_Q, (ii) 입력과 보조 입력 간 거리 ‖u_j - u_a_j‖_R, (iii) 인공 평형점과 목표점 간 거리 V_O(x_s,x*) 로 구성된다.
안정성 증명은 두 단계로 진행된다. 첫 번째 단계에서는 계약 불변 집합의 성질을 이용해, 현재 상태가 레이어 외부에 있을 경우 유한 시간 내에 다음 레이어로 이동함을 보인다. 이는 Lemma 2.5·2.6 에서 보인 “Ω ⊆ int S_∞ S_1(Ω,Ψ(Ω))” 성질을 활용한다. 두 번째 단계에서는 상태가 S_N 내부에 들어오면 기존 MPCT와 동일한 Lyapunov‑like 비용 구조가 적용되어, 인공 평형점 x_s 가 목표점 x* 로 수렴하고, 전체 비용이 감소함을 통해 점근적 안정성을 확보한다. 따라서 전체 시스템은 S∞ 안에서 전역적으로 안정한다.
시뮬레이션은 이중 적분기와 조화 진동기 시스템에 대해 수행되었다. 최소 지평 N=2 로도 제안된 MPC는 S∞ 전체를 수용 영역으로 확보했으며, 기존 MPCT는 같은 N 에서 S_N 정도만 보장했다. 또한, 레이어 집합은 오프라인에 미리 계산되므로 실시간 최적화 부담이 크게 증가하지 않았다. 계산 시간 측면에서도 기존 MPCT와 비교해 유사하거나 약간 감소하는 수준을 보였다.
결론적으로, 이 논문은 (1) 최소 지평에서도 최대 수용 영역을 보장하는 집합 기반 MPC 설계, (2) 인공 평형점 변수를 통한 목표점 변화에 강인한 재귀적 실현 가능성, (3) 계약 불변 집합 이론을 기반으로 한 엄격한 안정성 증명이라는 세 가지 주요 기여를 제공한다. 이러한 기여는 산업 현장에서 제한된 계산 자원과 빈번한 목표점 변동이 발생하는 상황에서 실용적인 제어 전략으로 활용될 가능성을 높인다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기