신뢰공간 의사결정 간소화와 희소화 기법
본 논문은 고차원 신뢰분포를 희소화하여 의사결정 문제를 간소화하고, 원래 문제와 동일하거나 손실이 보장된 최적 행동을 빠르게 선택하는 이론적 프레임워크와 실험적 검증을 제시한다.
저자: Khen Elimelech, Vadim Indelman
본 논문은 고차원 상태 공간에서 정의되는 신뢰공간(Belief Space) 상의 의사결정 문제를 효율적으로 해결하기 위한 새로운 접근법을 제시한다. 저자들은 먼저 의사결정 문제를 초기 상태 ξ, 후보 행동 집합 A, 목표 함수 V 로 구성된 3‑튜플 (ξ, A, V) 로 정의하고, 이를 간소화된 문제 (ξˢ, Aˢ, Vˢ) 로 변환함으로써 계산 복잡도를 낮추는 일반적인 프레임워크를 구축한다. 이때 간소화는 초기 신뢰, 목표 함수, 후보 행동 중 하나 혹은 여러 요소를 근사하거나 변형함으로써 이루어질 수 있다.
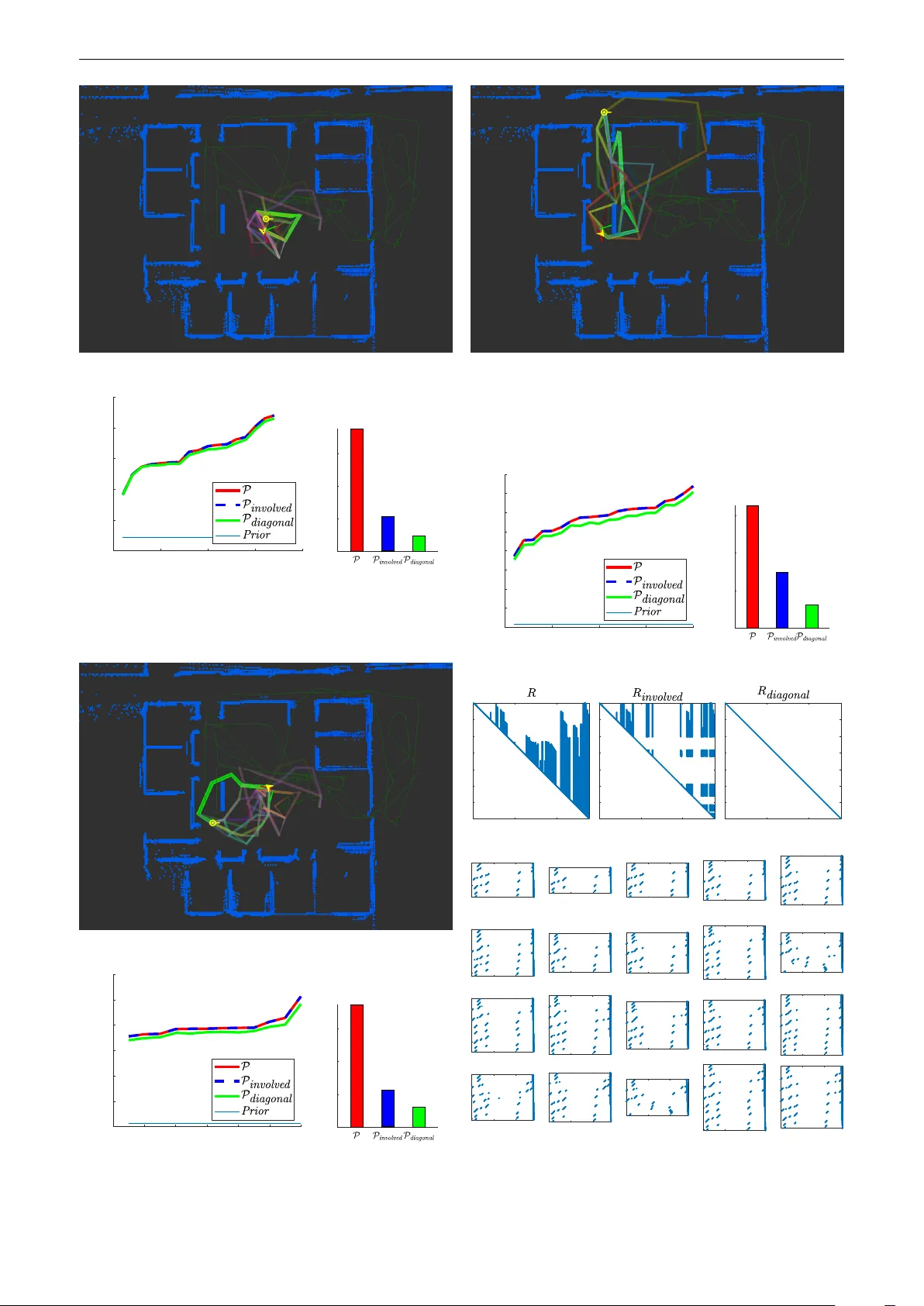
특히 본 연구는 신뢰공간에서의 간소화에 초점을 맞추어, 초기 신뢰 ξ 를 희소화된 형태 ξˢ 로 근사한다. 기존 연구들처럼 그래프‑기반 스파시피케이션이나 정보 행렬의 대각화만을 이용하는 것이 아니라, 저자들은 변수 간 상관관계를 선택적으로 제거하면서도 엔트로피를 정확히 보존하는 새로운 행렬 투영 방법을 제안한다. 이 방법은 정보 행렬의 비대칭성을 유지하면서도 비대칭 구조를 최소화해, 행렬 연산 비용을 크게 낮춘다.
희소화 알고리즘은 두 단계로 구성된다. 첫 번째 단계에서는 각 상태 변수에 대한 “중요도 스코어”를 계산해, 의사결정에 크게 기여하지 않는 변수들을 식별한다. 두 번째 단계에서는 식별된 변수들에 대해 상관관계를 제거하고, 남은 변수들 사이의 정보 행렬을 재구성한다. 이 과정에서 KL‑다이버전스 상한을 이용해 원본 신뢰와 희소 신뢰 사이의 차이를 정량화하고, 엔트로피 보존성을 수학적으로 증명한다.
목표 함수 Vˢ 는 희소 신뢰 ξˢ 를 기반으로 계산되며, 기존의 미분 엔트로피나 정보량 대신 행렬식, 트레이스, 혹은 최대 고유값과 같은 저비용 지표를 활용한다. 저자들은 이러한 근사 목표 함수와 원본 목표 함수 사이의 차이를 ε 로 제한하는 정리를 제시하고, 최적 행동 a* 와 근사 행동 â* 사이의 손실이 ε 이하임을 보장한다.
이론적 결과를 바탕으로, 저자들은 실제 로봇 시스템에 적용 가능한 스케일러블한 스파시피케이션 알고리즘을 구현하고, 활성 SLAM(active‑SLAM) 시나리오에서 실험을 수행한다. 실험에서는 후보 행동을 그래프‑기반 모션 플래너를 통해 생성하고, 각 행동에 대해 희소 신뢰를 전파하여 목표 함수를 평가한다. 결과적으로 원본 신뢰를 사용했을 때와 비교해 실행 시간이 평균 8~12배 단축되었으며, 최종 지도와 로봇 위치의 불확실성(엔트로피)에서는 통계적으로 유의미한 차이가 없었다.
또한, 기존의 POMDP 기반 온라인 플래너, Belief Roadmap, FIRM 등과 비교했을 때, 본 방법은 후보 행동 생성 단계와는 독립적으로 동작하면서도 행동 선택 단계에서 큰 계산 절감을 제공한다는 점에서 상호 보완적이다. 저자들은 기존 연구와 차별화되는 점으로 (1) 일반적인 의사결정 간소화 프레임워크 제공, (2) 엔트로피 보존을 전제로 한 신뢰 희소화, (3) 행동 선택 단계에서 직접적인 계산 비용 감소를 강조한다.
마지막으로 논문은 향후 연구 방향으로 비가우시안 신뢰 모델, 다중 로봇 협업, 그리고 다른 POMDP 기반 작업(예: 로봇 조작, 대화 관리) 등에 본 프레임워크를 확장하는 가능성을 제시한다. 또한, 현재 제시된 정리들을 활용해 후보 행동의 순위만을 보장하는 “순위 기반 의사결정” 이론을 발전시킬 여지도 논의한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기