증분 비선형 동적 역전으로 비행 제어 시스템 PI(D) 튜닝
본 논문은 항공 분야에서 널리 사용되는 증분 비선형 동적 역전(INDI)이 시간 지연 제어(TDC)와 동등함을 증명하고, 이를 기반으로 로봇 공학에서 알려진 PID와 TDC 사이의 관계를 이용해 비행 제어 시스템의 PI(D) 파라미터를 체계적으로 설계하는 방법을 제시한다. 또한 효율적인 모델‑프리 제어를 위해 효터 블렌딩 모델을 제거한 새로운 역전식도 제안한다.
저자: Paul Acquatella B., Wim van Ekeren, Qi Ping Chu
본 논문은 비행 제어 시스템에서 널리 사용되는 비선형 동적 역전(NDI)과 그 변형인 증분 비선형 동적 역전(INDI)의 이론적 기반을 재조명하고, 이를 시간 지연 제어(TDC)와 연결함으로써 PI(D) 제어기의 튜닝을 체계화한다.
1. **배경 및 동기**
전통적인 비행 제어는 여러 비행 상태에 대해 선형화된 PID 게인을 스케줄링하는 방식으로 설계된다. 이는 모델링 오차와 비선형성에 취약하며, 각 비행 구간마다 별도의 게인 설계가 필요해 설계 비용이 크게 증가한다. 반면 NDI는 비선형 항력을 직접 상쇄하고, 가상 입력 ν를 통해 1차 적분 형태(ω̇=ν)를 얻어 선형 제어를 가능하게 한다. 그러나 NDI는 정확한 공기역학 모델 f(ω)와 G(ω)에 크게 의존하므로 모델 불확실성에 취약하다.
2. **증분 비선형 동적 역전(INDI)의 도입**
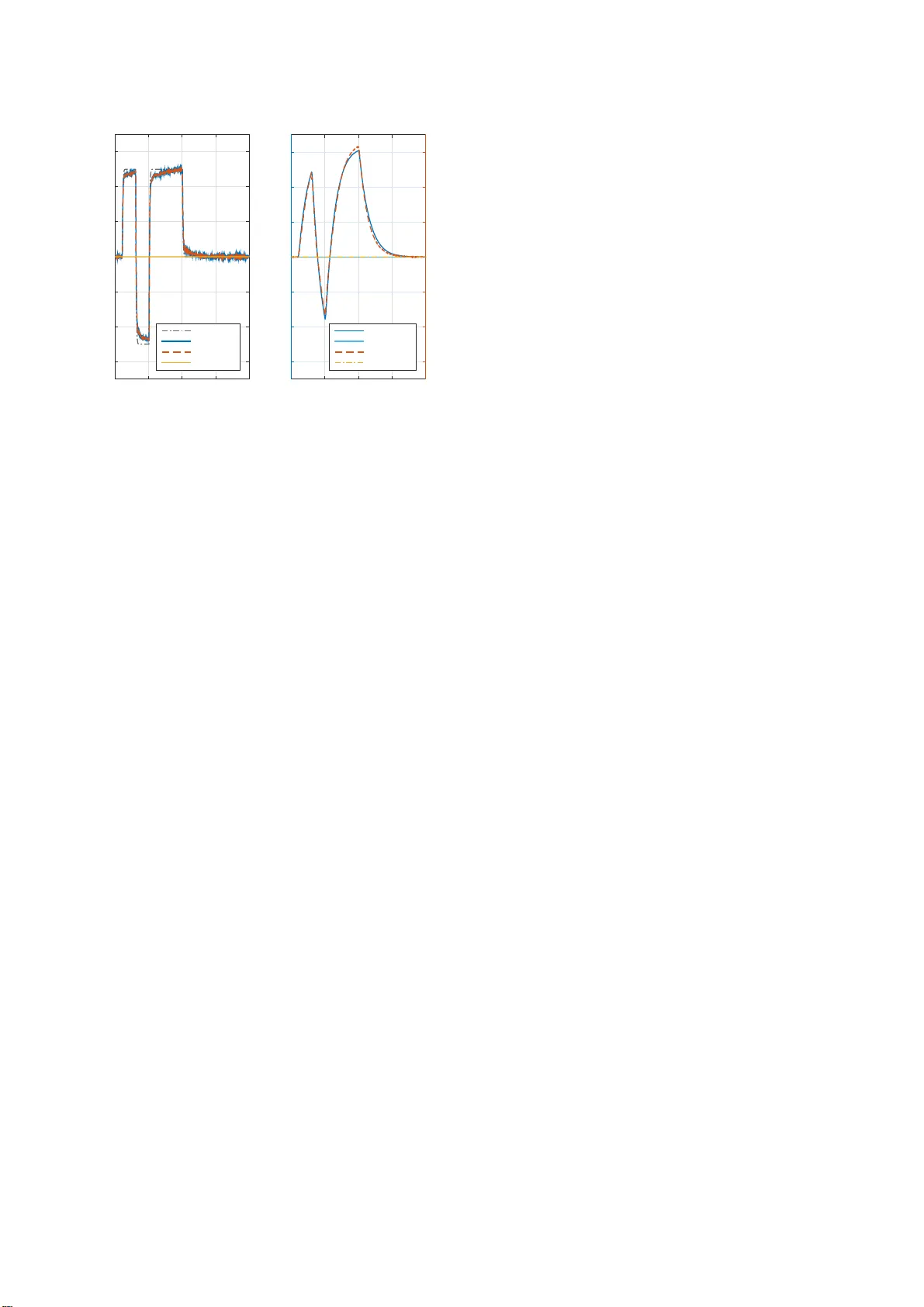
저자들은 시스템을 시간 지연 λ만큼 이전된 상태와 입력에 대해 1차 테일러 전개를 수행한다. λ가 충분히 작을 경우 f(ω(t‑λ))≈f(ω(t))가 성립하고, Δω̇≈G₀·Δδ라는 선형 관계가 도출된다. 여기서 Δδ는 현재 제어 입력과 지연된 입력의 차이며, G₀=G(ω(t‑λ))이다. 이 근사는 모델 의존성을 크게 감소시켜, 실제 센서 측정값(각속도와 제어면 변위)만으로도 정확한 제어법을 구현할 수 있게 만든다.
3. **시간 지연 제어(TDC)와의 동등성**
TDC는 H(t)=f(ω)+
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기