임의 형태 제한주기 설계가 가능한 데이터 기반 벡터장 진동기
본 논문은 2차원 연속 비선형 벡터장을 이용해, 비자기 교차(simple closed) 곡선 형태의 임의 주기 신호를 정확히 따라가는 제한주기(리밋 사이클)를 설계한다. 원하는 신호를 상태 의존 위상 변수에 매핑하고, 그 위상에 따라 목표점으로 향하도록 벡터장을 구성한다. 또한 출력 및 1차 미분을 제한하는 변환 기법을 제시하고, 전역적인 궤도 안정성을 라플라스·라우프노프 이론으로 증명한다. 시뮬레이션을 통해 전역 수렴과 출력 제한 효과를 확인…
저자: Venus Pas, i, Aiko Dinale
1. 서론
논문은 생물학적 진동기의 특성(동기화·환경 적응·강인성)을 엔지니어링에 도입하고자 하는 배경을 제시한다. 기존의 Hopf, Matsuo 등은 특정 형태의 제한주기만을 생성할 수 있어 복잡한 주기 신호를 재현하는 데 한계가 있다. 따라서 비자기 교차(simple closed) 곡선 형태의 임의 주기 신호를 정확히 재현할 수 있는 2차원 연속 시스템이 필요함을 강조한다.
2. 배경 이론
2.1 기호와 정의에서는 실수 집합, C^k 함수, T‑주기 함수, simple closed curve 등을 정의한다. 2.2에서는 주기 궤적의 안정성(Stable, AS, OS, AOS)을 정의하고, OS와 AOS가 AS보다 완화된 조건임을 설명한다. 2.3에서는 궤도 안정성을 분석하는 두 가지 전통적 방법인 Poincaré map과 transverse dynamics(이동 Poincaré 섹션)를 소개한다. 특히 transverse dynamics를 이용해 라우프노프 함수를 구성하고, 그 안정성을 라플라스 원리를 통해 증명하는 절차를 서술한다.
3. 데이터 기반 벡터장 진동기(DV‑O) 설계
목표 신호 f(t) 를 T‑주기 C³ 함수로 가정하고, 상태 s=(s, ẋ)와 위상 ϕ(s)를 (2)식에 따라 정의한다. 위상에 따라 세 영역(R1,R2,R3)으로 나누어 목표점 (f(ϕ), f′(ϕ))을 할당한다. 동역학식 (1) ẍ = f″(ϕ) − α(ẋ − f′(ϕ)) − β(s − f(ϕ)) 은 목표점으로의 수렴을 유도한다.
안정성 증명은 가중 오차 e와 라우프노프 후보 v=½e² 를 도입하고, ϕ̇을 구해 ẋe와 ẋv를 계산한다. ẋv ≤ 0 이며, ẋv=0 인 경우는 오직 e=0, 즉 (s, ẋ)=(f(ϕ), f′(ϕ)) 일 때만 발생한다. 라플라스 레마에 의해 전역(또는 거의 전역)적인 AOS가 확보된다.
α와 β는 양의 상수·함수이며, α를 (14)–(15)와 같이 상태에 따라 조정하면 D₀ 내부에서 ϕ가 연속이고, D₀ 외부에서도 거의 전역적인 수렴을 보장한다.
4. 출력 제한을 위한 변환
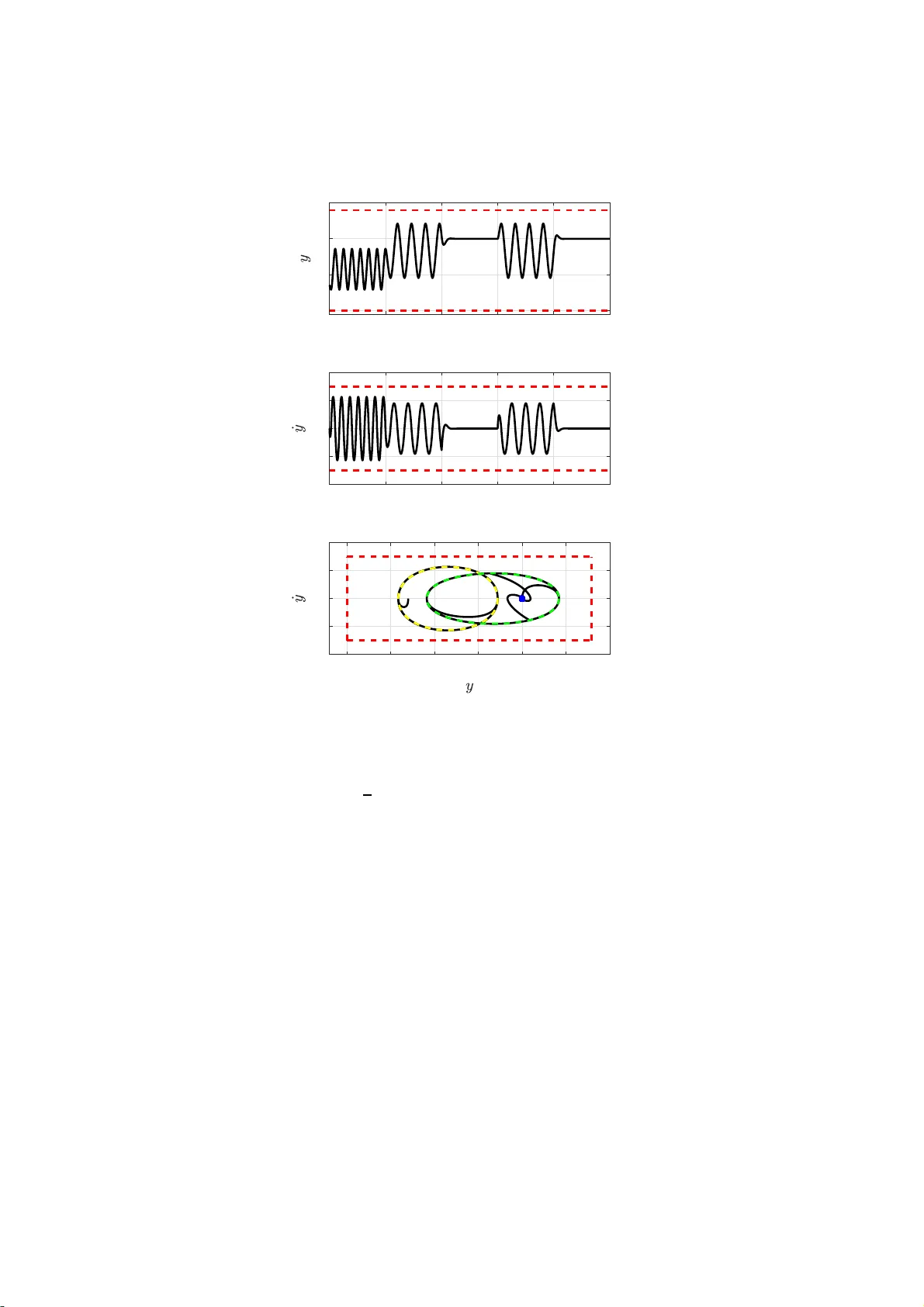
실제 로봇 시스템에서는 출력 y와 그 미분 ẏ에 물리적 한계가 존재한다. 이를 위해 y = y_avg + δ_y tanh(s/τ) 로 정의하고, y_avg와 δ_y를 출력 구간의 중앙값·반폭으로 설정한다. tanh 함수는 출력이 사전에 정의된 구간을 초과하지 않도록 포화(saturation) 효과를 제공한다. 또한 ẏ의 제한을 위해 τ(t) 를 적절히 설계한다.
5. 시뮬레이션 결과
다양한 목표 파형(비대칭 사인, 삼각파, 복합 파형)을 설정하고, DV‑O가 해당 파형을 정확히 추적함을 확인한다. 출력 제한 변환을 적용했을 때도 y와 ẏ가 정의된 구간 내에 머무르며, 수렴 속도와 오버슈트가 기존 PD 제어보다 우수함을 보인다. 또한 초기 조건을 크게 변동시켜도 거의 전역적인 수렴이 관찰된다.
6. 결론 및 전망
본 논문은 (1) 임의 형태 제한주기를 생성하는 연속 벡터장 설계, (2) 위상‑의존 매핑을 통한 전역 궤도 안정성 증명, (3) 출력 및 1차 미분 제한을 위한 비선형 변환 기법을 제시한다. 향후 연구에서는 다차원(>2) 시스템으로 확장, 실시간 학습 기반 위상 추정, 하드웨어 구현 및 로봇 관절 제어에 적용하는 방향을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기