부분관측 LQG 시스템을 위한 최적 제어기·양자화기 선택 및 스케줄링
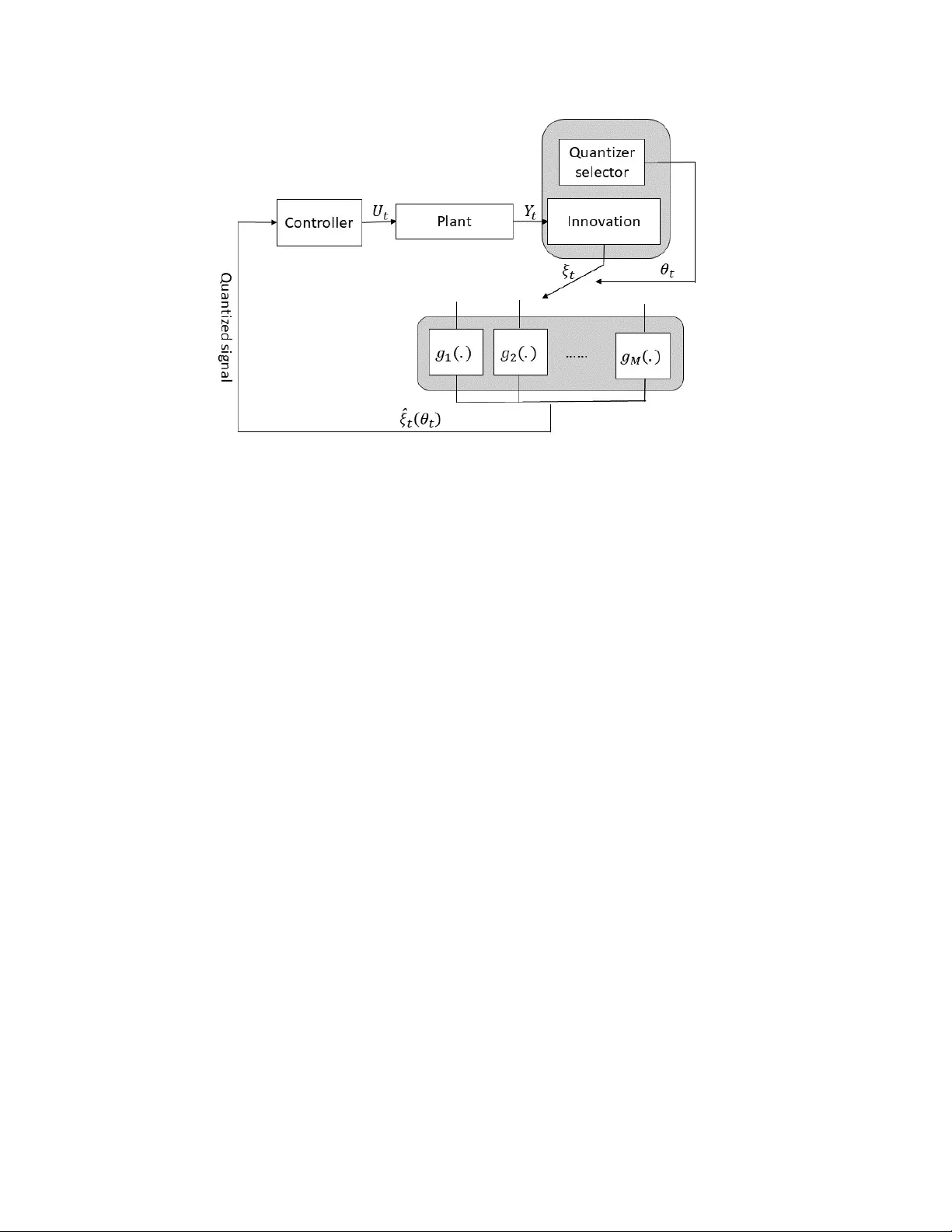
본 논문은 부분관측 선형‑가우시안(LQG) 시스템에서 측정값을 양자화한 후 제어기에 전달하는 상황을 다룬다. 여러 해상도·지연·비용을 가진 양자화기 후보군 중에서 매 순간 최적의 양자화기를 선택하고, 동시에 최적 제어기를 설계한다. 혁신 신호(innovation)를 양자화하도록 설계하면 제어기 설계와 양자화기 선택 문제가 각각 리카티 방정식과 선형계획법(LP)으로 분리되어 오프라인으로 해결 가능함을 보인다. 또한 지연 및 순서 뒤섞임을 고려한 …
저자: Dipankar Maity, Panagiotis Tsiotras
**1. 서론 및 연구 동기**
네트워크 기반 제어 시스템에서는 센서 데이터가 제한된 대역폭을 통해 전송되므로, 데이터를 양자화하여 전송하는 것이 일반적이다. 양자화 해상도가 낮을수록 전송 지연과 비용이 감소하지만, 제어 성능은 악화된다. 기존 연구들은 양자화기의 설계 자체에 초점을 맞추었으며, 양자화와 제어를 동시에 최적화하는 공동 설계 문제는 비선형·포화 특성 때문에 거의 해결되지 못했다. 특히 부분관측 시스템에서는 상태 추정이 필요하므로 문제는 더욱 복잡해진다.
**2. 시스템 모델**
시간 불변 선형 시스템을
\(X_{t+1}=AX_t+BU_t+W_t,\; Y_t=CX_t+ν_t\)
로 정의하고, 초기 상태와 프로세스·측정 잡음은 각각 평균 0, 공분산 \(\Sigma_x, W, V\) 를 갖는 가우시안이다. M개의 양자화기 \(Q_i\) 가 제공되며, 각 양자화기는 레벨 수 \(\ell_i\), 지연 \(d_i\) (비감소 순서), 사용 비용 \(\lambda_i\) 를 가진다. 양자화기 선택 변수 \(\theta_{i,t}\in\{0,1\}\) 로 매 시점 하나의 양자화기만 사용하도록 제약한다.
**3. 비용 함수**
제어 목표는 전통적인 LQG 비용과 양자화 사용 비용의 가중합을 최소화하는 것이다.
\(J = \mathbb{E}\Big
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기