교차로 충돌 방지를 위한 안전 검증 및 감독 제어
** 본 논문은 도로 교차로에서 차량들의 충돌 위험을 실시간으로 판단하고, 필요 시 안전한 제어 입력으로 개입하는 감독 알고리즘을 설계한다. 안전 검증을 작업장 스케줄링 문제로 변환하고, 비선형 2차 차량 동역학을 포함하는 MINLP를 두 개의 MILP(하한·상한) 문제로 근사한다. 상한 MILP의 최적 비용이 양수이면 감독기가 개입하도록 설계했으며, 이론적 비차단성 및 실시간 구현 가능성을 입증한다. **
저자: Heejin Ahn, Domitilla Del Vecchio
**
본 논문은 도로 교차로에서 다수의 차량이 사전에 정의된 경로를 따라 이동할 때 발생할 수 있는 충돌 위험을 실시간으로 판단하고, 필요 시 안전한 제어 입력으로 개입하는 **감독(supervisor) 알고리즘**을 설계한다. 연구는 크게 네 부분으로 구성된다.
1. **시스템 모델링**
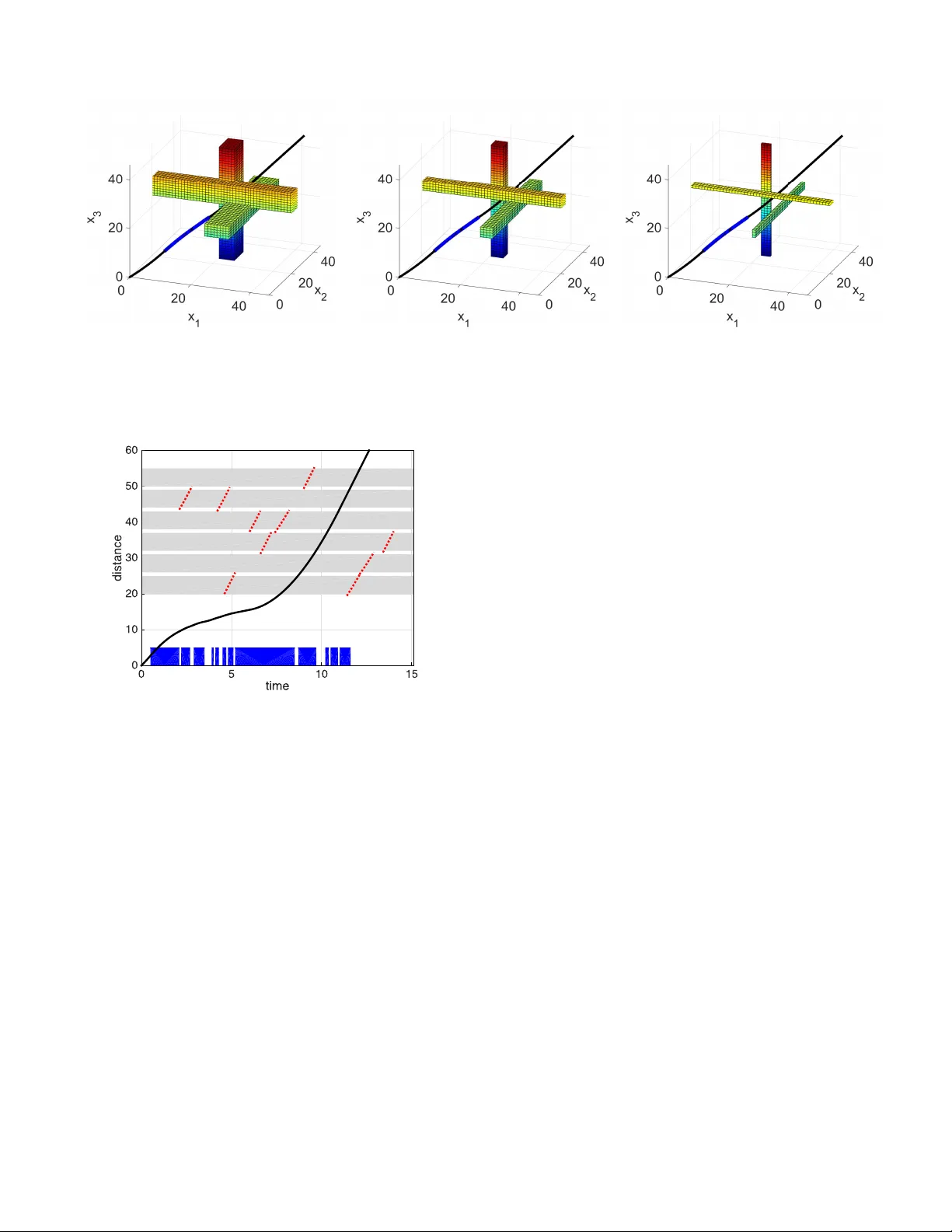
- 교차로는 여러 **conflict area**(충돌 구역)들의 집합으로 모델링된다. 각 구역은 두 차량 경로가 겹치는 구간이며, 차량 길이를 고려해 구역 길이를 확장한다.
- 차량의 종단선형 동역학은 \(\ddot x_j = f_j(x_j,\dot x_j,u_j)\) 로 표현되며, 입력 \(u_j\)는 가속·감속 명령이다. 중요한 가정은 **단조성(monotonicity)** 으로, 입력·초기 상태가 모두 증가하면 위치도 비감소한다는 특성이다. 이를 통해 차량이 특정 위치에 도달하는 최소·최대 시간을 구할 수 있다.
2. **안전 검증 문제 정의**
- 초기 상태 \((x(0),\dot x(0))\)가 주어졌을 때, 모든 가능한 입력 신호 집합 \(U\) 중 하나를 선택해 차량들이 **bad set**(두 차량이 동일 구역에 동시에 존재하는 상태)으로 진입하지 않게 할 수 있는지 여부를 판단한다.
- 직접적인 reachable set 계산은 고차원 비선형 시스템에서 계산량이 급증하므로, 이를 **작업장 스케줄링** 문제로 변환한다.
3. **스케줄링 문제와 MINLP**
- 각 차량‑구역 쌍 \((i,j)\)를 작업(job)으로 보고, 작업의 **release time** \(R_{ij}\), **deadline** \(D_{ij}\), **process time** \(P_{ij}\)를 차량 동역학을 이용해 정의한다.
- 선행 관계는 차량이 따라가는 경로(C)로, 충돌 구역을 공유하는 차량 간의 순서는 비선형 관계(D)로 모델링한다.
- 목표는 모든 작업이 충돌 없이 수행될 수 있도록 **maximum lateness** \(\max_{(i,j)} (T_{ij} - D_{ij})\) 를 최소화하는 것이다. 이 최적화는 차량의 2차 비선형 동역학을 포함하므로 **Mixed‑Integer Nonlinear Programming (MINLP)** 형태가 된다.
4. **MILP 근사와 감독 설계**
- MINLP를 직접 푸는 것이 실시간에 부적합하므로, 두 개의 **Mixed‑Integer Linear Programming (MILP)** 문제를 도입한다.
* **하한 MILP**: 차량 동역학을 1차(속도만 제어) 모델로 단순화하고, 입력 구간을 제한해 최소 가능한 비용을 계산한다.
* **상한 MILP**: 입력 구간을 전체 허용 범위로 확대해 가장 보수적인(최악의) 비용을 계산한다.
- 두 MILP는 각각 원 MINLP의 최적 비용을 **하한**·**상한**으로 제공한다는 정리를 증명하고, 근사 오차를 이론적으로 한계값으로 제시한다.
- 감독 알고리즘은 상한 MILP의 최적 비용이 양수(즉, 충돌 회피가 불가능)인 경우에만 개입한다. 개입 시에는 사전에 설계된 안전 제어 입력(예: 최대 감속)으로 차량을 강제한다.
5. **이론적 특성 증명**
- **비차단성(non‑blocking)**: 어떤 초기 상태에서도 감독이 교차로를 영구적으로 막지 않으며, 언제든지 안전한 통과가 가능하도록 보장한다. 이는 상한·하한 MILP가 모두 유한한 해를 갖는 경우에 수학적으로 증명된다.
- **최소 제한성(minimum restriction)**: 감독은 충돌이 실제로 발생할 위험이 있을 때만 개입하므로, 운전자의 의도를 최대한 유지한다.
6. **시뮬레이션 및 실시간 검증**
- 20대 차량이 동시에 교차로에 접근하는 시나리오를 포함한 여러 실험에서, 상·하한 MILP 모두 10 ~ 30 ms 내에 해결되었으며, 이는 실시간 적용에 충분한 속도이다.
- 상한·하한 비용 차이는 평균 5 % 이하로, 근사 정확도가 높음을 확인했다.
- 충돌 회피가 가능한 경우, 감독은 개입하지 않으며, 충돌 위험이 감지되면 즉시 안전 제어 입력을 적용해 충돌을 방지한다.
**핵심 기여**
- 차량 단조성을 이용해 안전 검증을 작업장 스케줄링 문제로 변환한 새로운 이론적 프레임워크.
- 비선형 2차 동역학을 포함한 MINLP를 두 MILP로 근사해 실시간 해결 가능성을 확보한 알고리즘.
- 비차단성을 보장하면서 최소 제한적인 감독 제어 전략을 설계·증명.
이러한 접근은 완전 자동 교차로 관리와 달리 운전자의 선택을 존중하면서도, 충돌 위험을 즉시 차단할 수 있는 실용적인 솔루션을 제공한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기