베이지안 학습 기반 안전 적응 제어
본 논문은 베이지안 모델 학습을 활용하여 안전·안정성을 보장하면서도 실시간으로 동적 불확실성을 적응적으로 보정하는 제어 프레임워크(BALSA)를 제안한다. 확률적 제어 Lyapunov 함수와 Barrier 함수 이론을 결합하고, Gaussian Process 또는 베이지안 신경망을 통해 모델 오차와 확산 항의 불확실성을 정량화한다. 고속 지형 주행 로버에 적용해 시뮬레이션 및 실제 하드웨어 실험을 수행하였다.
저자: David D. Fan, Jennifer Nguyen, Rohan Thakker
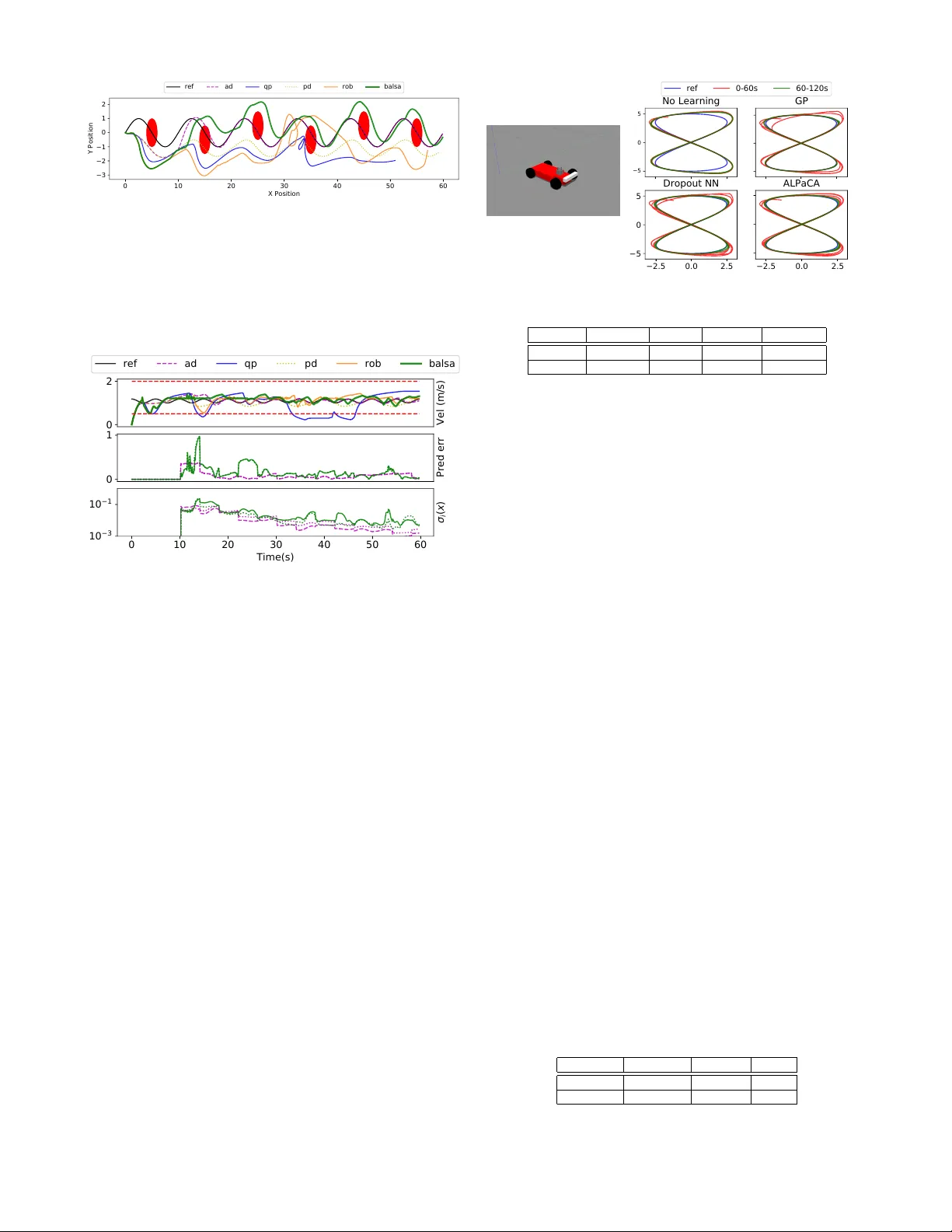
본 논문은 안전‑중요 시스템에 딥러닝 기반 모델 학습을 적용하기 위한 새로운 프레임워크인 BALSA(Bayesian Learning‑based Safety and Adaptation)를 제안한다. 기존의 딥러닝 적용은 블랙‑박스 특성으로 인해 안전·안정·실시간성 보장이 어렵다는 한계가 있었으며, 특히 우주 탐사와 같은 고위험 분야에서는 인간의 직접적인 개입이 필수적이었다. 저자들은 이러한 문제를 해결하기 위해 베이지안 모델 학습을 핵심 요소로 채택하고, 확률적 제어 Lyapunov 함수(CLF)와 Barrier 함수(CBF)를 활용해 안전과 안정성을 수학적으로 보장한다.
시스템 모델링은 2차계통 형태의 확률 미분 방정식(SDE)으로 시작한다. 상태 x =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기