자율차량을 활용한 동적 경로 제어로 혼합 교통 혼잡 최소화
본 논문은 자율주행 차량만을 제어해 인간 운전자의 경로 선택을 간접적으로 유도함으로써, 혼합 자율교통망에서 교통 혼잡을 감소시키는 방법을 제시한다. 딥 강화학습(PPO) 기반 정책을 학습하고, 평행 도로 네트워크에 대한 균형 해석을 통해 최적 균형을 다항시간으로 계산한다. 실험 결과, 제안된 정책이 사고·수요 급증 등 외란 상황에서도 평균 여행 시간을 크게 단축시키며, 기존 MPC·그리디 방식보다 우수함을 보인다.
저자: Daniel A. Lazar, Erdem B{i}y{i}k, Dorsa Sadigh
본 논문은 “동적 라우팅 게임”이라는 프레임워크를 도입해, 전체 차량 중 일부만 자율주행 차량으로 구성된 혼합 교통망에서 교통 혼잡을 완화하는 방법을 제시한다. 연구 배경으로는 기존의 혼잡 완화 수단(가격제, 가변 속도 제한, 램프 메터링 등)이 인프라 변경이나 정책적 제약이 크다는 점을 들며, 자율차가 도로 용량을 늘릴 수 있다는 점을 활용하고자 한다.
**모델링**
- 도로는 셀 전송 모델(CTM) 기반으로 이산 셀로 나뉘며, 각 셀 i는 자유 흐름 속도 \(\bar v_i\), 인간 차량 헤드웨이 \(h_i^h\), 자율차 헤드웨이 \(h_i^a\)를 가진다.
- 셀의 임계 밀도 \(\tilde n_i(\alpha_i)=\frac{b_i}{\alpha_i h_i^a+(1-\alpha_i)h_i^h}\) 로 정의되며, 여기서 \(\alpha_i\)는 해당 셀 내 자율차 비율이다.
- 최대 흐름 \(\bar F_i(\alpha_i)=\bar v_i \tilde n_i(\alpha_i)\) 로, 자율차 비율이 높을수록 용량이 증가한다.
- 송신·수신 함수와 충돌점(conflict point) 우선순위 \(\beta\)를 이용해 교차로 흐름을 계산하는 알고리즘(Algorithm 1)을 제시한다.
**게임 이론적 분석**
- 인간 운전자는 매 시점 현재 가장 짧은 경로를 선택하는 ‘자기이익 라우팅’ 규칙을 따른다. 이는 전통적인 혼잡 게임의 나쉬 균형과 동일하다.
- 평행 도로(다중 경로) 네트워크에 대해, 각 도로의 용량 함수가 자율차 비율에 따라 선형적으로 변함을 이용해, 전체 평균 지연을 최소화하는 ‘최적 균형(optimal equilibrium)’을 다항시간으로 구하는 알고리즘을 제시한다.
- 최적 균형은 모든 도로의 여행 시간(지연)이 동일하도록 자율차 흐름을 배분하는 형태이며, 이는 기존 연구가 제시한 ‘가격제’ 없이도 달성 가능함을 보인다.
**강화학습 기반 정책**
- 모델‑프리 딥 강화학습, 구체적으로 Proximal Policy Optimization(PPO)를 사용해 자율차 라우팅 정책을 학습한다.
- 상태 입력: 각 셀의 현재 밀도 \(n_i\), 자율차 비율 \(\alpha_i\), 그리고 경로별 차량 비중 \(\mu_i(p)\) 등.
- 행동 출력: 각 자율차가 선택할 경로에 대한 확률 분포(또는 직접적인 경로 선택).
- 보상 함수는 전체 평균 여행 시간의 감소량(또는 전체 지연의 부정값)으로 정의되어, 정책이 전체 시스템 효율을 직접 최적화하도록 설계한다.
**실험 및 결과**
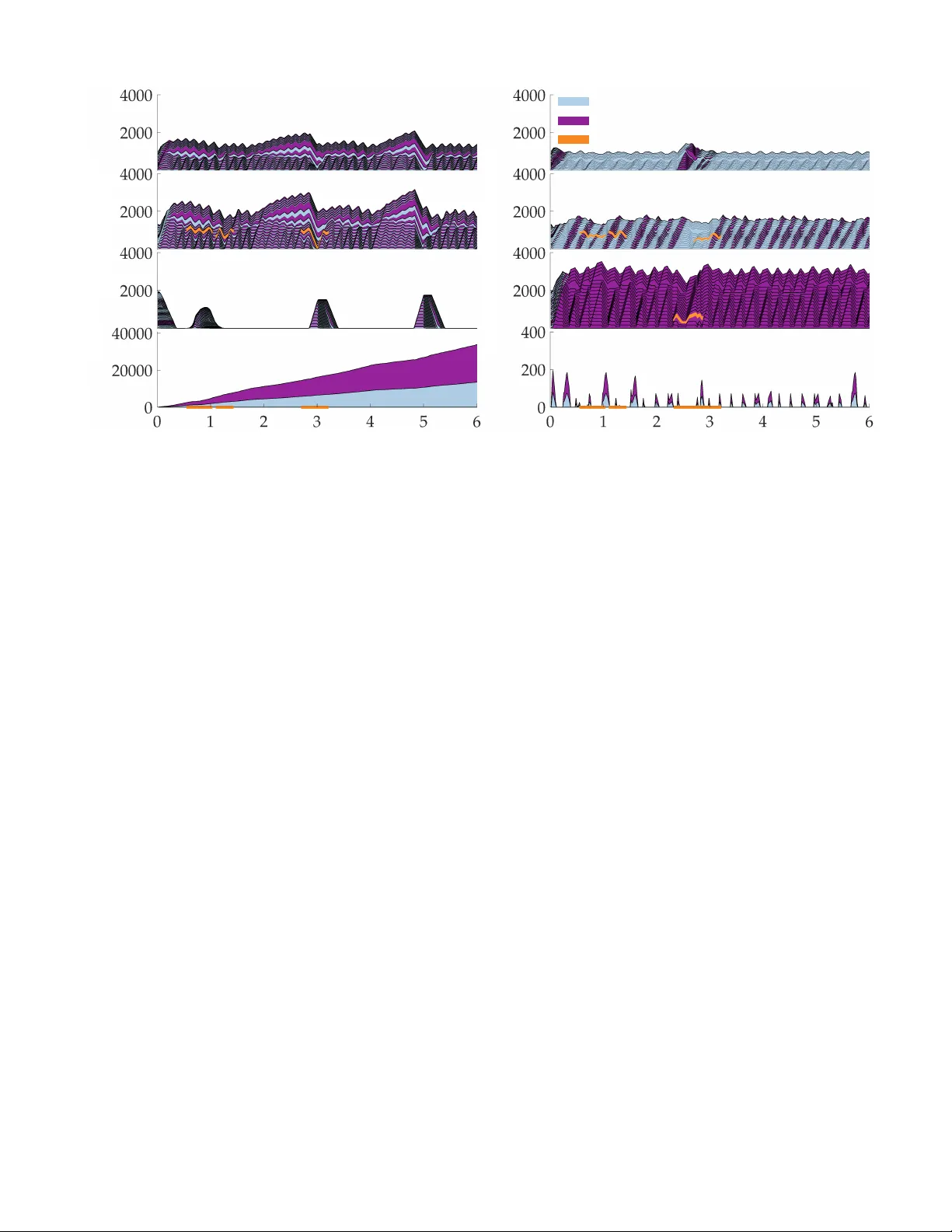
- 실험은 두 종류의 네트워크(평행 도로와 보다 복잡한 교차로 포함 네트워크)에서 수행되었다.
- 수요 급증, 특정 도로 차단(사고) 등 외란을 가했을 때, 제어되지 않은 경우 평균 여행 시간이 급격히 상승하지만, 학습된 RL 정책은 빠르게 새로운 균형을 찾아 평균 여행 시간을 30~50% 수준으로 감소시켰다.
- 또한, 동일 조건에서 Model Predictive Control(MPC) 기반 최적 제어와 그리디 흐름 재분배 기법을 적용했을 때보다 RL 정책이 일관적으로 더 낮은 지연을 기록하였다.
- 특히, 자율차 비율이 10% 수준으로 낮아도 정책이 효과를 발휘했으며, 비율이 증가할수록 개선 폭이 커지는 경향을 보였다.
**의의 및 한계**
- 이 연구는 자율차가 전체 교통 흐름에 미치는 ‘용량 증대 효과’를 정량화하고, 이를 이용해 인간 운전자의 라우팅 선택을 간접적으로 조정함으로써 사회적 최적을 달성할 수 있음을 증명한다.
- 이론적 분석과 실험적 검증을 동시에 제공함으로써, 기존의 정적 균형 분석을 동적 라우팅 게임으로 확장한다.
- 한계로는 모델링된 CTM이 실제 도로의 복잡한 미세 행동(예: 차선 변경, 급정거 등)을 완전히 포착하지 못한다는 점과, 정책이 학습된 특정 네트워크 구조에 의존할 가능성이 있다는 점을 들 수 있다. 향후 연구에서는 보다 일반적인 네트워크 토폴로지와 실시간 교통 센서 데이터를 활용한 온라인 학습, 그리고 인간 운전자의 행동 모델을 보다 정교하게 반영하는 방안을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기