환경 흐름을 고려한 듀빈 차량의 실시간 최단시간 경로 계획
본 논문은 바람·해류와 같은 환경 흐름이 존재할 때, 곡률 제한 차량(듀빈 차량)의 최소 시간 경로를 실시간으로 계산하는 새로운 방법을 제시한다. 기존 6가지 듀빈 경로 중 해석적으로 풀 수 있는 LSL·RSR만을 이용하고, 각 원호의 회전 각을 0~4π 로 확장함으로써 모든 목표 자세에 대한 완전 도달성을 보장하면서도 계산량은 기존 2π‑arc 방식과 동일하게 유지한다. 이론적 증명과 대규모 몬테카를로 시뮬레이션을 통해 4π‑arc 경로가 2…
저자: Khushboo Mittal, Junnan Song, Shalabh Gupta
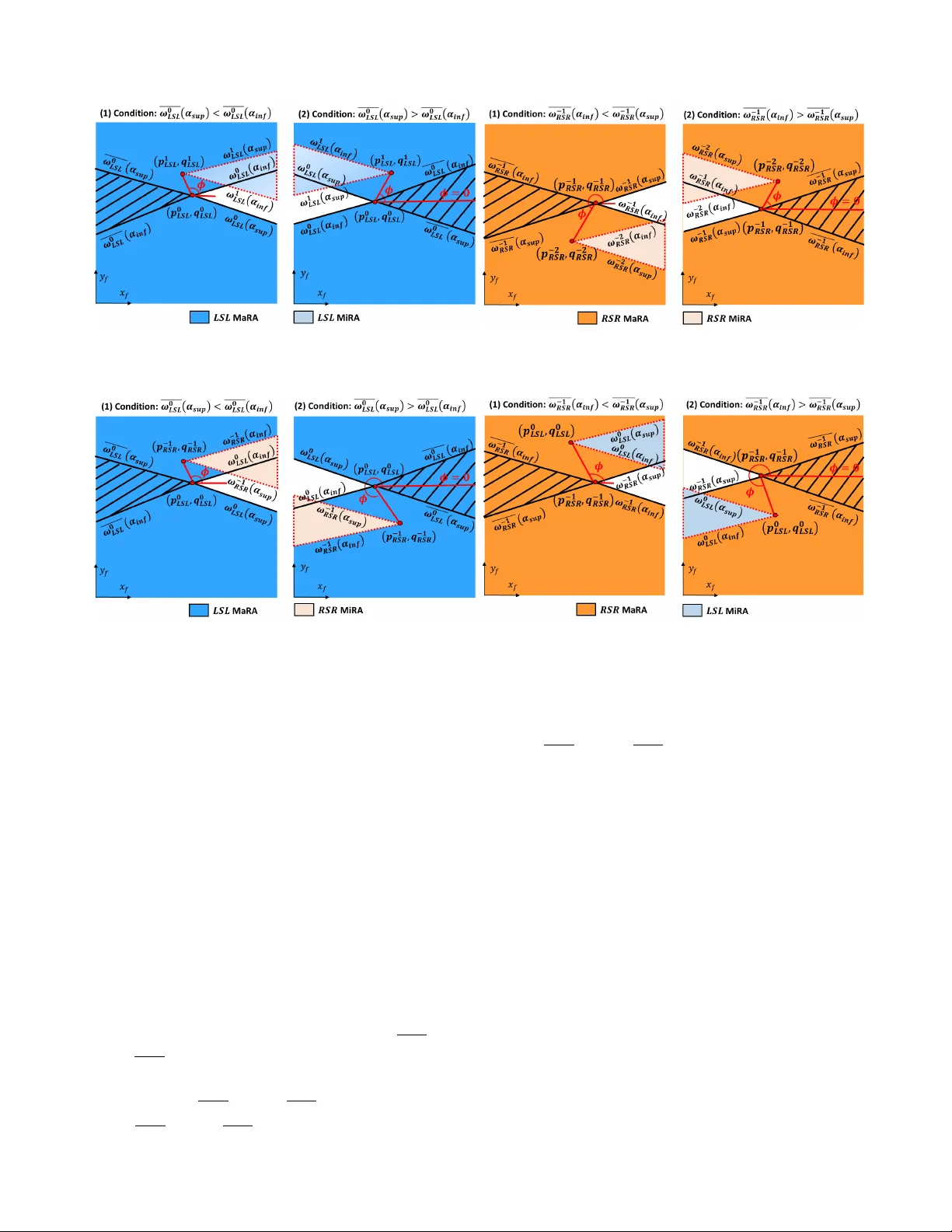
본 논문은 환경 흐름(바람·해류) 하에서 곡률 제한 차량, 즉 듀빈 차량의 최소 시간 경로를 실시간으로 계산하는 새로운 방법을 제시한다. 서론에서는 곡률 제한 차량의 경로 계획이 로봇 공학에서 기본적인 문제이며, 기존 듀빈 이론은 6가지 경로 유형(LSL, RSR, LSR, RSL, LRL, RLR) 중 하나가 최단 거리·시간 경로임을 보인다. 그러나 흐름이 존재하면 차량의 실제 이동 경로는 흐름에 의해 왜곡되어 최소 시간 경로가 달라진다. 기존 연구들은 관성 프레임(IF) 혹은 흐름 프레임(CF)에서 해를 구했으며, LSL·RSR는 해석적으로 풀 수 있지만 나머지 네 경로는 초월함수 방정식의 근을 찾아야 하는 비선형 연산을 요구한다. 이러한 근 찾기 과정은 계산량이 크고, 실시간 재계획이 필요한 동적 상황에서는 적용이 어렵다.
본 연구는 두 가지 핵심 아이디어로 이 문제를 해결한다. 첫째, LSL과 RSR 경로만을 사용한다. 둘째, 각 원호의 회전 각을 기존의
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기